Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 153 of 909
Traverse Mode Status Bits
Status
Word Bit Description
7 8 Trajectory is in progress. Indicates that trajectory is being generated and
continuous motion is in progress, even if in a dwell state.
Bit is cleared when X, S, fault, OFF or MFMUL=0 ends the trajectory.
7 9 Ascend: In Traverse mode, this indicates the lower traverse point ramp is
in progress.
7 10 Slew: in Traverse mode, this indicates the slew segment is in progress.
7 11 Descend: In Traverse mode, this indicates the higher traverse point ramp
is in progress.
7 12 Dwell: In Traverse mode, this indicates the higher dwell state in
progress.
7 13 State: The most recent Traverse mode state.
=0 Motion profile is set to/moving in the forward direction. This is the
power-up default state.
=1 Motion profile is set to/moving in the reverse direction.
The use of status word 7, bit 13 is undefined in other modes of operation
with trajectory 2.
7 14 Dwell: In Traverse mode, this indicates the lower dwell state in progress.
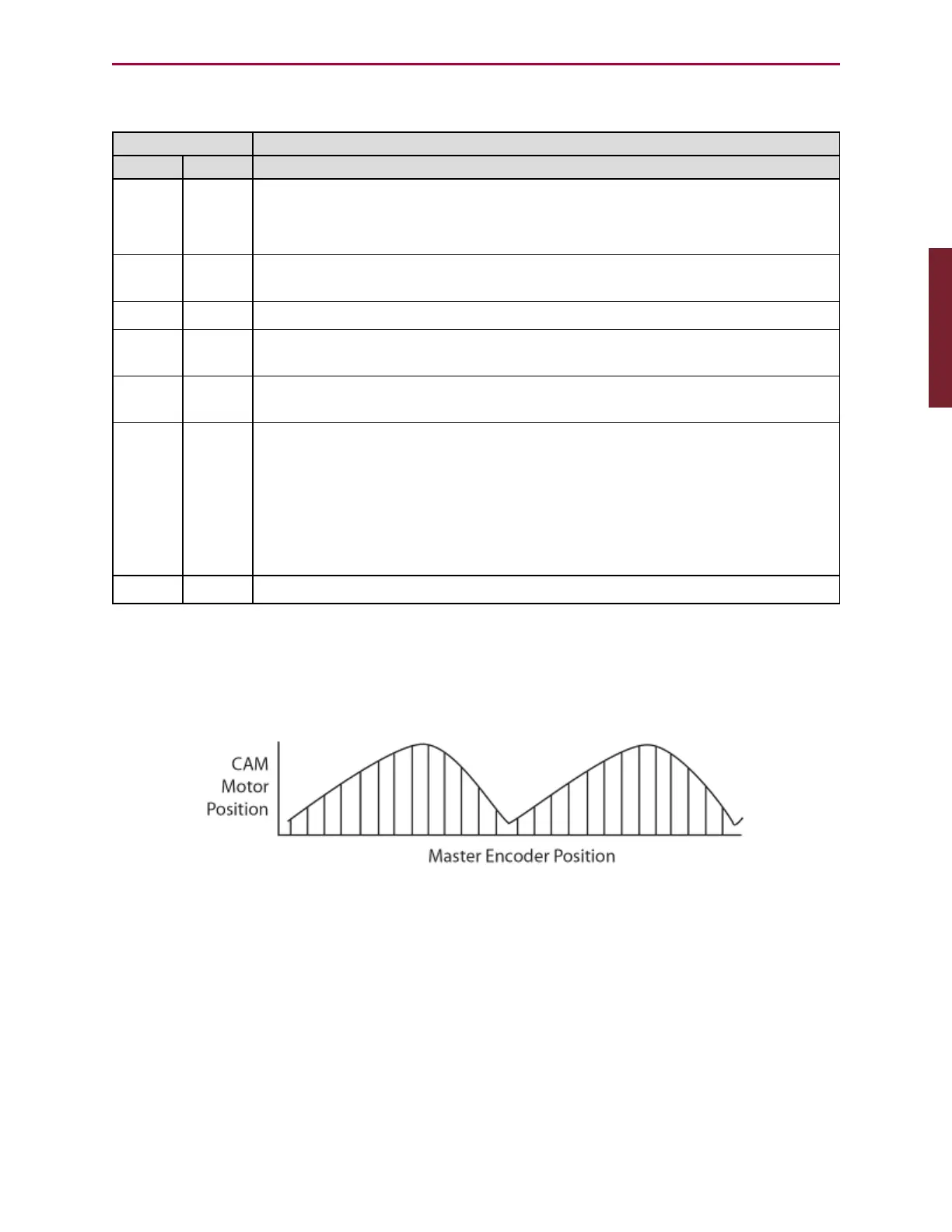
CamMode (Electronic Camming)
Electronic camming is similar to mechanical cams — for a given master rotating device, a
slave device tracks the speed and moves through a fixed profile of positions. In electronic
camming, the profile is a look-up table of data stored in the slave motor.
Example Cam Profile
The SmartMotor supports motion profiles based on data stored in a Cam table. The Cam table
can reside in EEPROM memory or in the user array.
NOTE: Cam tables can be written to EEPROM memory, which retains its contents
when power is removed; or to the variable data space, which provides more
flexibility but is cleared when power is removed.
Part 1: Programming: Traverse Mode Status Bits