Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 156 of 909
Electronic Camming Details
For a brief description of the Cam mode (electronic camming) commands in this section, see
Electronic Camming Commands on page 162. Follow mode (electronic gearing) commands
were previously discussed in Electronic Gearing Commands on page 138. Also, refer to the
detailed command descriptions in Part 2: SmartMotor Command Reference on page 238.
Understanding the Inputs
There are two modes of operation (and associated commands) that involve the Trapezoidal
Move Profile (TMP) as follows:
l
MFR (Mode Follow Ratio) / MSR (Mode Step Ratio): TMP function only
MFR uses external encoder input if it is in quadrature mode; MSR uses step/direction
mode. When using SRC(2) — internal time base at PID rate — there isn’t a distinction.
l
MC (Mode Cam): TMP function with Cam function
The TMP function's output (intermediate counts)feeds into the cam’s input.
Motion is created by "massaging" TMPintermediate counts into the cam table. It is
NOTgearing summed with camming. If the cam length is 0, there is no motion!
Use the Fixed Segment Cam Simulator (on the Moog Animatics website, in the folder
http://www.animatics.com/tools) to learn how to properly select the appropriate settings that
perform the number of cam cycles desired. For example, you can use it to determine the
settings if the application intends to perform a single-shot of the whole cam (refer to
Camming - Demo XYCircle on page 836 for a single-shot program example).
NOTE: The Fixed Segment Cam Simulator is intended as a gearing/camming
training aid only. It is not designed as an all-inclusive means for creating camming
applications.
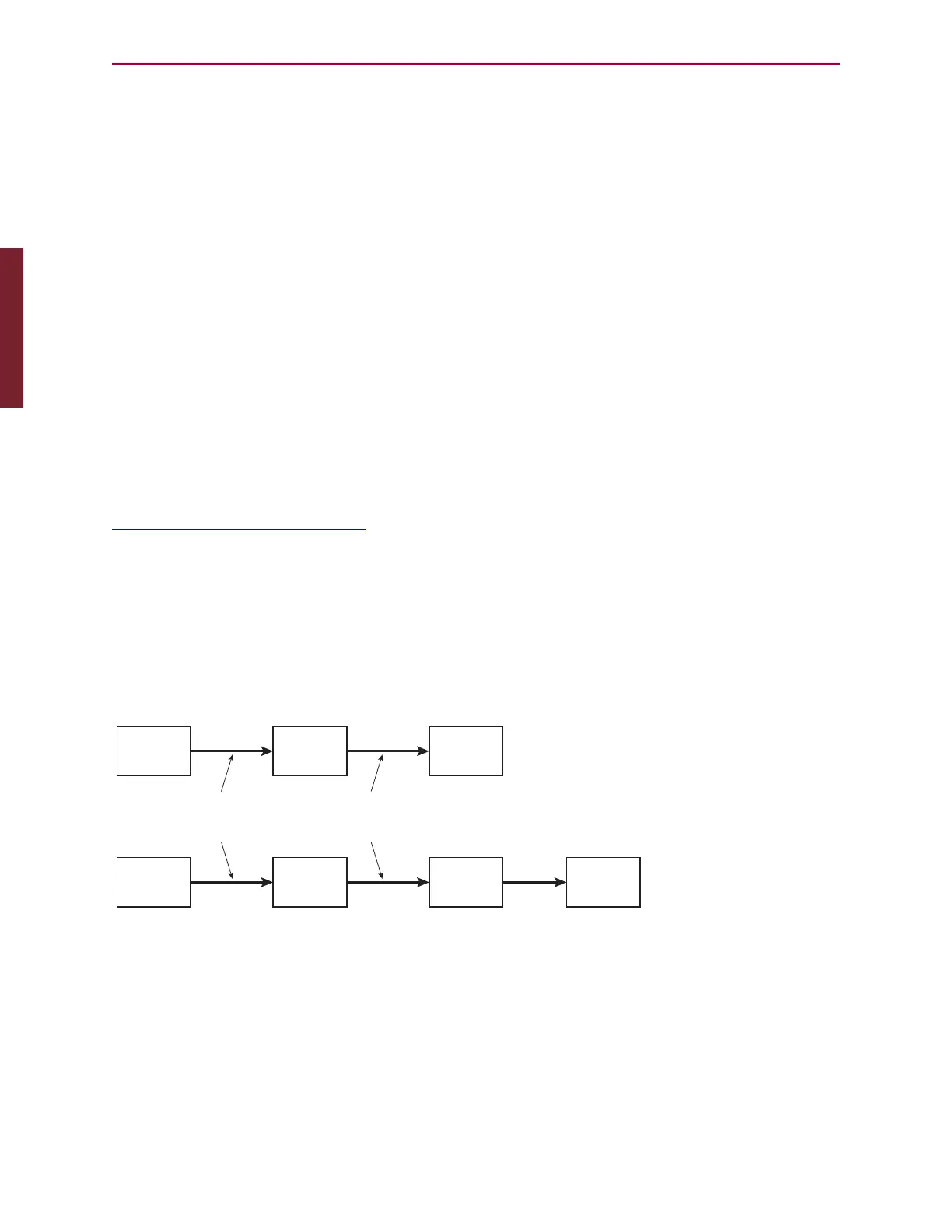
Refer to the following figure.
Encoder
input
Trap. move
prof. (TMP)
Output
motion
Encoder
input
Cam
function
Output
motion
Follow mode (MFR)
Cam mode (MC)
NOTE: The relationship between TMP source counts and TMP intermediate counts is aected by the ratio of MFMUL/MFDIV.
For gearing, MFMUL/MFDIV determines how far; for camming, MFMUL/MFDIV determines how fast.
MFA(x,0)
Source counts
input to TMP
MFA(x,1)
Intermediate counts
output from TMP
MFD and MFSLEW are handled in
the same manner in terms of
“source” and “intermediate” counts
Trap. move
prof. (TMP)
Source Counts
Intermediate
Counts
Source Counts Intermediate
Counts
Motion is created by “massaging ” TMP
Intermediate Counts into the cam table. It
is NOT gearing summed with camming!
I.e., if cam length is 0, there is no motion!
Follow Mode and Cam Mode Functional Diagrams
NOTE: Before programming an electronic camming application, it is strongly
recommended to first evaluate your application in terms of source counts or
intermediate counts, and variable or fixed cam. Refer to the following two sections.
Part 1: Programming: Electronic Camming Details