Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 429 of 909
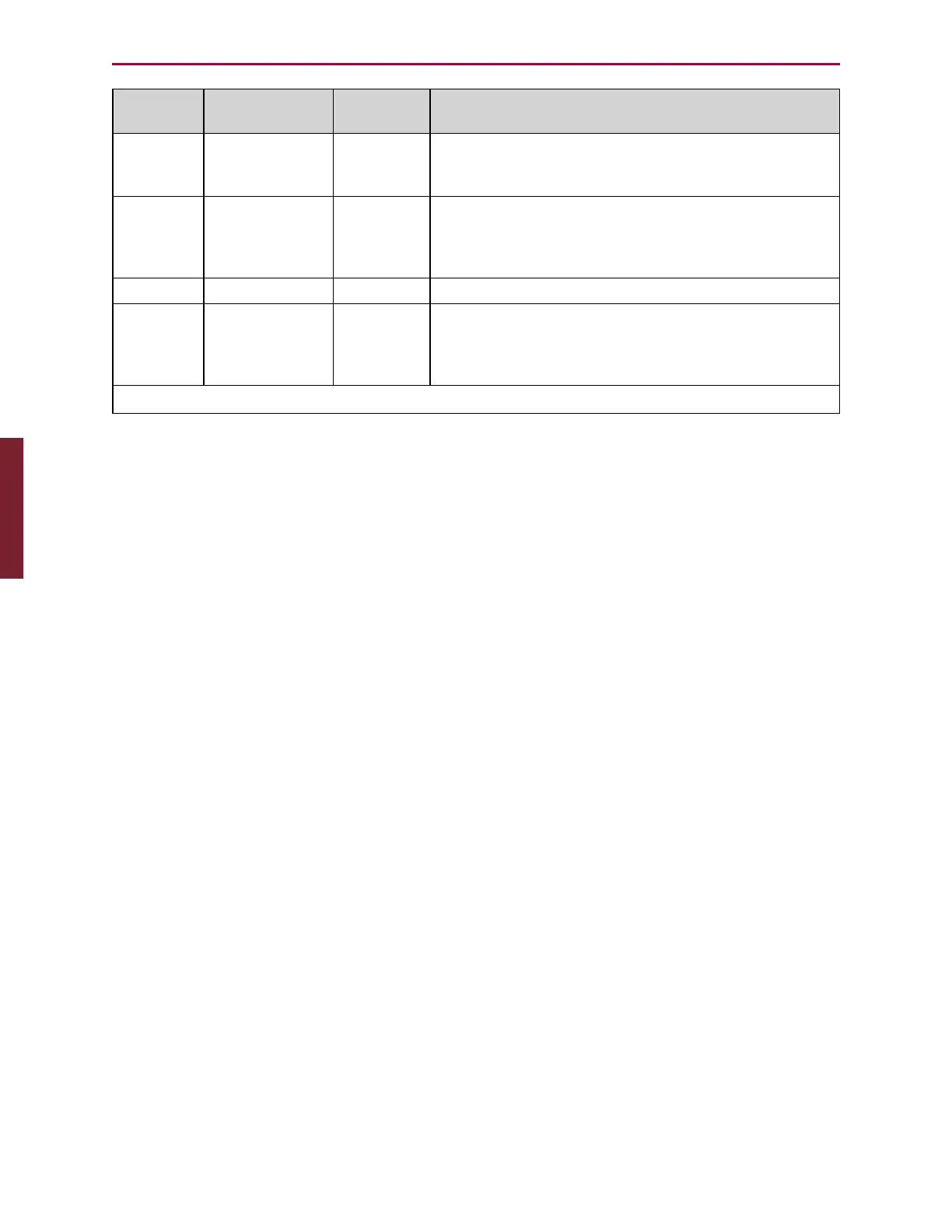
'function'
'value'
range
Encoder
type
Description
-1 N/A ABS* Removes the effect of the ENCCTL(0,value)
command. PA offset is then set as shipped from the
factory.
0 -2147483648
to
2147483647
ABS* Sets the current absolute position to 'value'. This
calculates the offset required and stores it in
nonvolatile memory. Motor firmware will adjust
absolute position with offset on every power up.
5 N/A ABS* Reset error flags.
6 0,1,2 ABS* Report encoder firmware version to the terminal.
value 0: Report lowest byte (minor rev)
value 1: Report mid byte (major rev)
value 2: Report high byte (firmware type)
*Requires the absolute encoder option for the M-style motor.
EXAMPLE:
EIGN(W,0) 'Make all onboard I/O inputs
ZS 'Clear errors
ENCCTL(0,0) 'Set absolute encoder to zero
RELATED COMMANDS:
ENCD(in_out) Set Encoder Bus Port as Input or Output (see page 430)
Part 2: Commands: ENCCTL(function,value)