Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 580 of 909
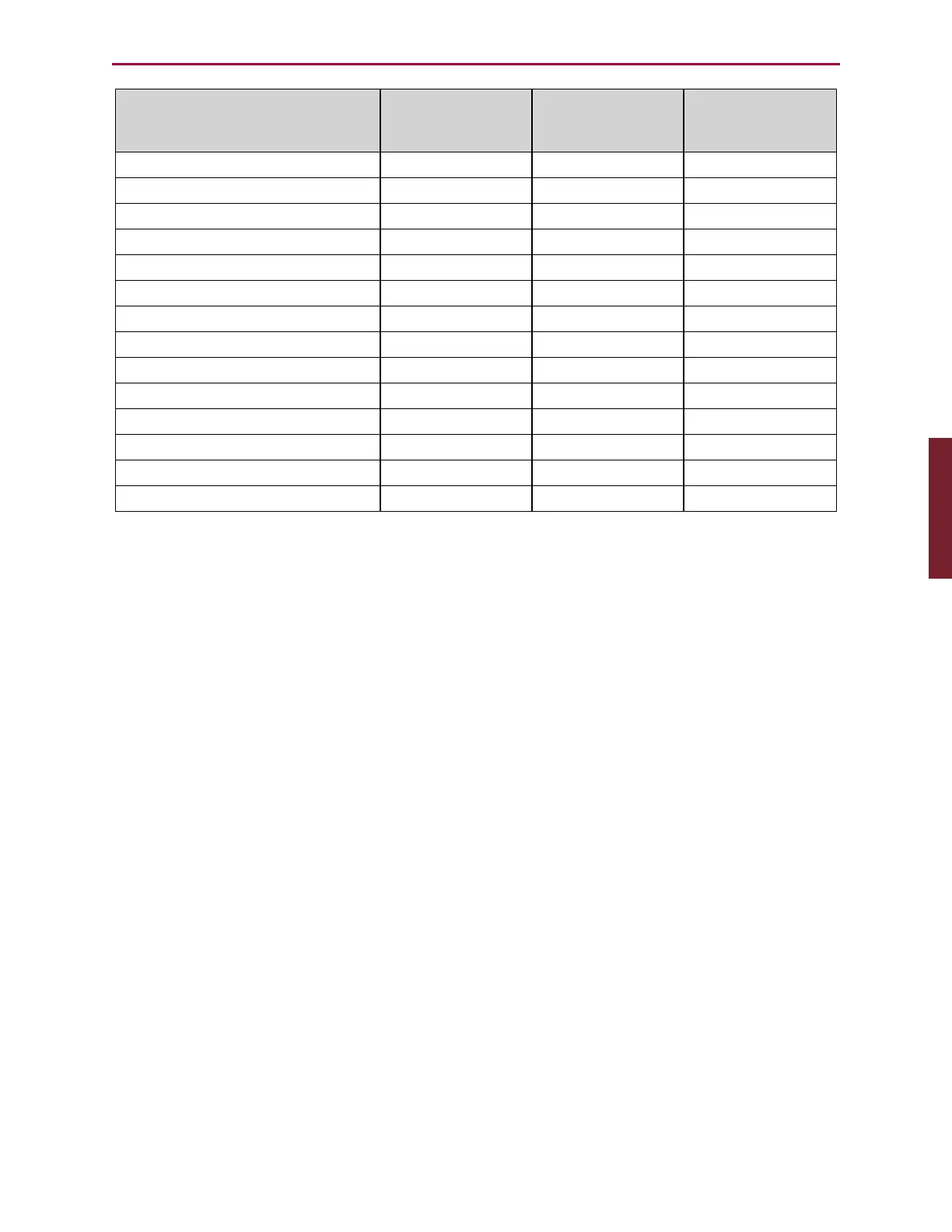
Meaning
Value from
MODE
or MODE(0)
Trajectory 1
MODE(1)
Trajectory 2
Mode(2)
CANopen Interpolation 7 7 0
Torque (MT) 4 4 0
Velocity (MV) 3 3 0
Position (MP) 1 1 0
Null (move generator inactive) 0 0 0
Quadrature Follow (MFR) -2 0 -2
Step/Direction Follow (MSR) -3 0 -3
Cam (MC) -4 0 -4
Mixed: MP and MFR -5 1 -2
Mixed: MP and MSR -5 1 -3
Mixed: MP and MC -5 1 -4
Mixed: MV and MFR -5 3 -2
Mixed: MV and MSR -5 3 -3
Mixed: MV and MC -5 3 -4
EXAMPLE:
In the SMIeditor, create the following program, download it to a SmartMotor and then run it.
EIGN(W,0) 'Disable hardware limits
ZS 'Clear status bits
MP 'Set position mode
AT=500 'Preset acceleration.
VT=1000000 'Preset velocity.
PT=0 'Zero out position.
O=0 'Declare origin
G 'Servo in place
END 'Required END of program command
At the SMI software Terminal window, type the following commands:
NOTE: Do not enter the comments — those are for your information and to show
what is returned by the commands.
RMODE 'Reports 1 for position mode
PRINT(MODE,#13) 'Prints 1 for position mode
Edit the program and substitute MV (velocity mode), download it to a SmartMotor and then
run it.
At the SMI software Terminal window, type the following commands:
NOTE: Do not enter the comments — those are for your information and to show
what is returned by the commands.
RMODE 'Reports 3 for velocity mode
PRINT(MODE,#13) 'Prints 3 for velocity mode
Part 2: Commands: MODE