Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 880 of 909
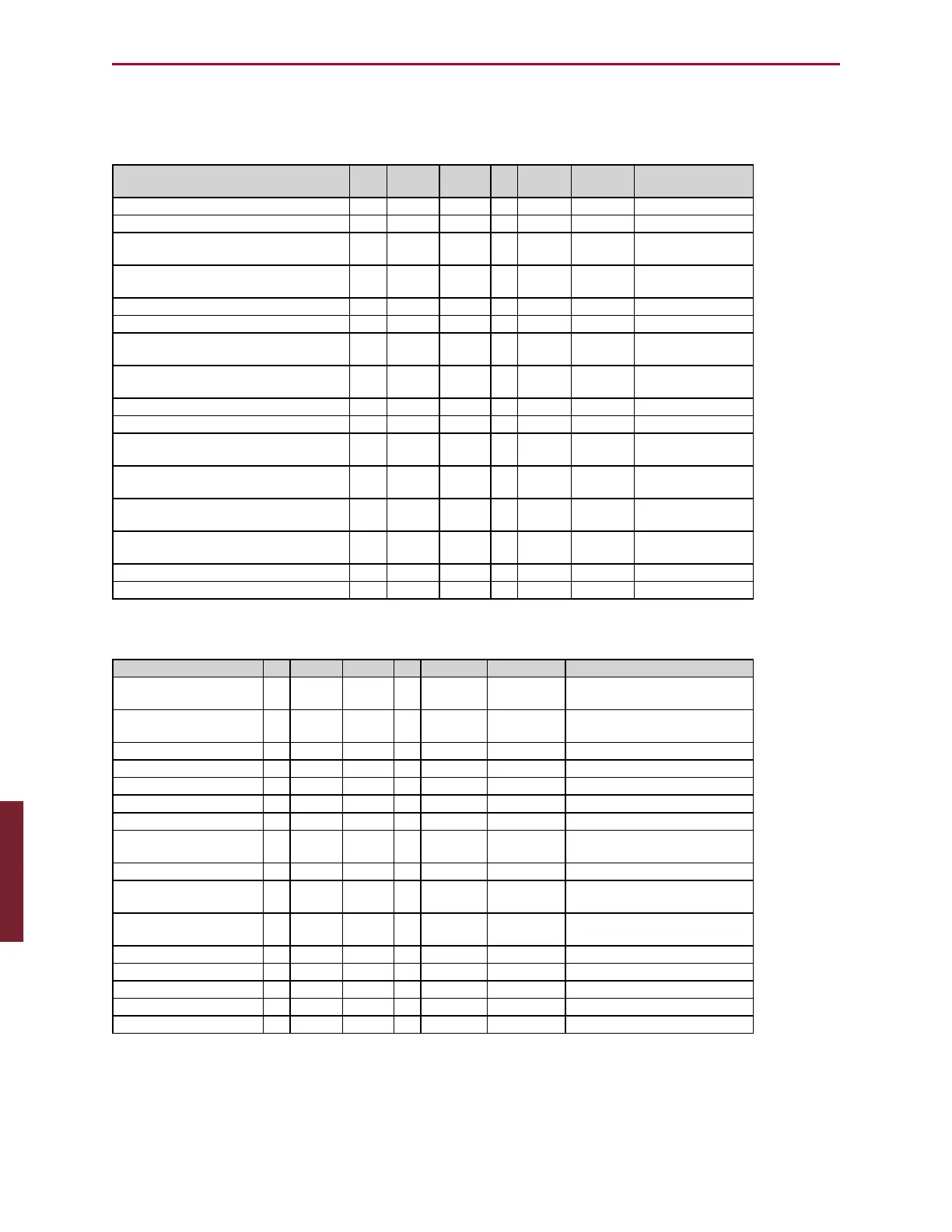
Status Word: 1Index Registration and Software Travel
Limits
Description Bit To Clear Value Bit To read Assign
Related
Commands
Rise Capture Encoder(0) Armed 1 0 RB(1,0) =B(1,0) Ai(0)
Fall Capture Encoder(0) Armed 2 1 RB(1,1) =B(1,1) Aj(0)
Rising edge captured ENC(0) (historical
bit)
Bi(0) ZS 4 2 RB(1,2) =B(1,2)
Falling edge captured ENC(0) (historical
bit)
Bj(0) ZS 8 3 RB(1,3) =B(1,3)
Rise Capture Encoder(1) Armed 16 4 RB(1,4) =B(1,4) Ai(1)
Fall Capture Encoder(1) Armed 32 5 RB(1,5) =B(1,5) Aj(1)
Rising edge captured ENC(1) (historical
bit)
Bi(1) 64 6 RB(1,6) =B(1,6)
Falling edge captured ENC(1) (historical
bit)
Bj(1) 128 7 RB(1,7) =B(1,7)
Capture input state 0 (indicator) Bx(0) ZS 256 8 RB(1,8) =B(1,8)
Capture input state 1 (indicator) Bx(1) ZS 512 9 RB(1,9) =B(1,9)
Software Travel Limits Enabled 1024 10 RB(1,10) =B(1,10)
SLE, SLD, SLM
(mode)
Soft limit mode (indicator): 0-Don’t Stop.
1-Cause Fault. Default is 1
2048 11 RB(1,11) =B(1,11) SLM(mode)
Historical positive software over travel
limit
Brs Zrs 4096 12 RB(1,12) =B(1,12) SLP=formula, RSLP
Historical negative software over travel
limit
Bls Zls 8192 13 RB(1,13) =B(1,13) SLN=formula, RSLN
Real time positive soft limit (indicator) Bps 16384 14 RB(1,14) =B(1,14) RBps
Real time negative soft limit (indicator) Bms 32768 15 RB(1,15) =B(1,15) RBms
Status Word: 2Communications, Program and Memory
Description Bit To Clear Value Bit To read Assign Related Commands
Error on Communications
Channel 0
1 0 RB(2,0) =B(2,0)
RCHN(0), OCHN(), CCHN(),
BAUD(0)=
Error on Communications
Channel 1
2 1 RB(2,1) =B(2,1)
RCHN(1), OCHN(), CCHN(),,
BAUD(1)=
USB Error 4 2 RB(2,2) =B(2,2)
Reserved 3 8 3 RB(2,3) =B(2,3)
CAN Port Error 16 4 RB(2,4) =B(2,4) RCAN, CBAUD, CADDR
Reserved 5 32 5 RB(2,5) =B(2,5)
Ethernet Error 64 6 RB(2,6) =B(2,6)
I²C Running 128 7 RB(2,7) =B(2,7)
PRINT1(), GETCHR1,
OCHN(), CCHN()
Watchdog Event 256 8 RB(2,8) =B(2,8)
ADB (Animatics Data
Block) Bad Checksum
512 9 RB(2,9) =B(2,9)
Program Running 1024 10 RB(2,10) =B(2,10)
RUN, RUN?, PAUSE, RESUME,
END, GOTO, GOSUB, RETURN, Z
Trace in Progress 2048 11 RB(2,11) =B(2,11)
EE Write Buffer Overflow 4096 12 RB(2,12) =B(2,12) EPTR=, VST(), VLD()
EE Busy 8192 13 RB(2,13) =B(2,13) EPTR=, VST(), VLD()
Command Syntax Error Bs ZS 16384 14 RB(2,14) =B(2,14) RERRC, =ERRC, REERW, =EERW
Program Checksum Error Bk ZS 32768 15 RB(2,15) =B(2,15)
Appendix: Status Word: 1Index Registration and Software Travel Limits