8
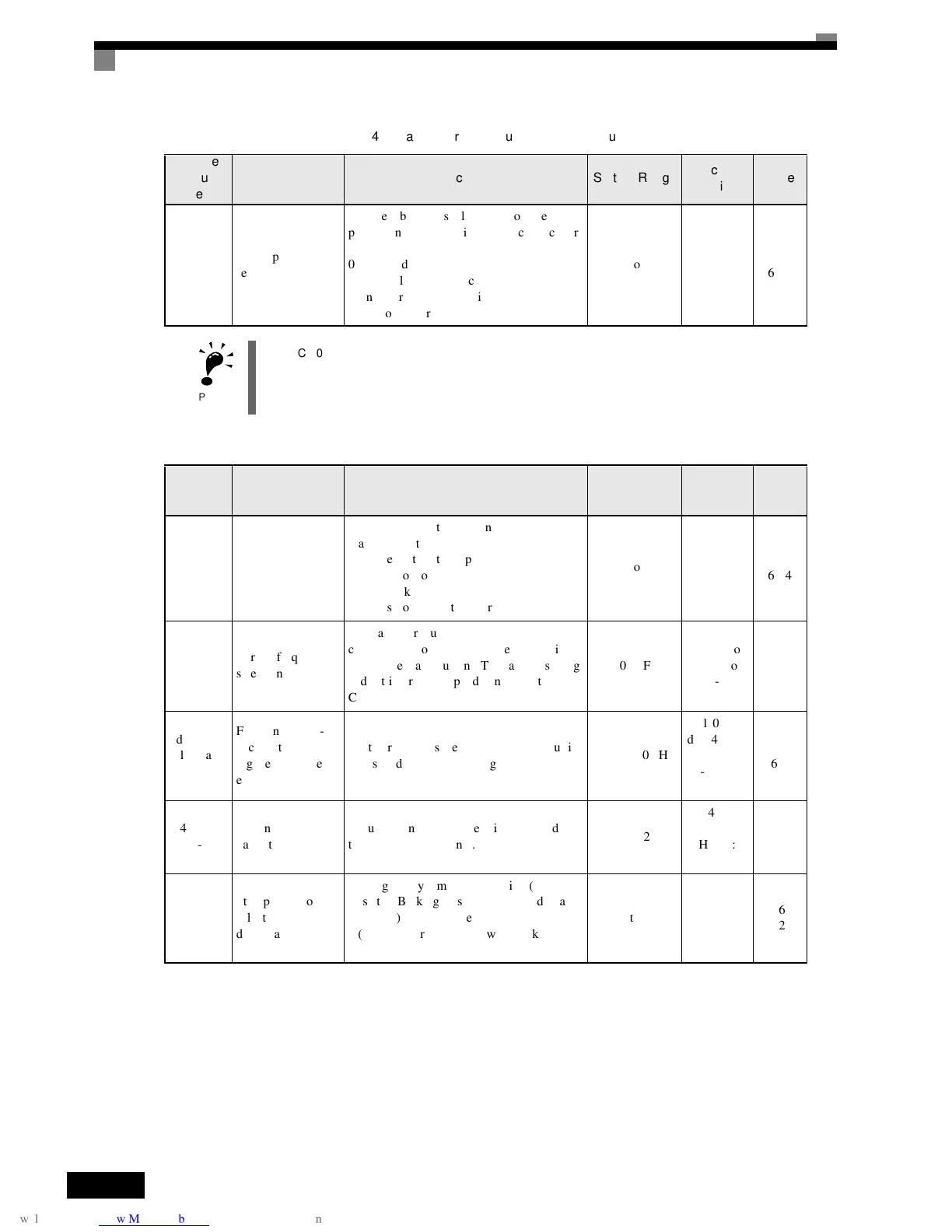
L1-01
Motor
protection
selection
Set
to
enable
or
disable
the
motor
overload
protection
function
using
the
electronic
ther-
mal
relay.
0:
Disabled
1:
General
motor
protection
2:
Inverter
motor
protection
3:
Vect or
motor
protection
0
to
31
5-56
6-47
IMPORTANT
When C6-01 is set to 0 (CT), not-low noise will apply and the Inverter overload withstand ratio will be
150% of the Inverter rating per minute. When C6-01 is set to 1 (VT), low noise will apply and the Inverter
overload withstand ratio will be 120% of the Inverter rating per minute. If C6-01 is set to 1 (VT) when
overload withstand capability is required by the application, the life of the Inverter may be reduced.
Table 4.3 Parameters that are set as required
Parame-
ter Num-
ber
Name Description Setting Range
Factory
Setting
Page
b1-03
Stopping
method
selection
The
stopping
method
when
the
stop
com-
mand
is
input.
0:
Deceleration
to
stop
1:
Coast
to
stop
2:
DC
braking
stop
3:
Coast
to
stop
with
timer
0
to
30
5-13
6-14
C6-02
Carrier
frequency
selection
The
carrier
frequency
is
set
low
if
the
motor
cable
is
50
m
or
longer
or
to
reduce
radio
noise
or
leakage
current.
The
factory
setting
and
setting
range
depends
on
the
setting
of
C6-01.
0
to
F
Depends
on
setting
of
C6-01.
5-25
d1-01
to
d1-04
and
d1-17
Frequency
refer-
ences
1
to
4
and
jog
frequency
ref-
erence
Set
the
required
speed
references
for
multi-
step
speed
operation
or
jogging.
0
to
400.00 Hz
d1-01
to
d1-04:
0.00
Hz
d1-17:
6.00
Hz
5-27
6-6
H4-02
and
H4-05
FM
and
AM
termi-
nal
output
gain
Adjust
when
an
instrument
is
connected
to
the
FM
or
AM
terminal.
0.00
to
2.50
H4-02:
1.00
H4-05:
0.50
5-52
L3-04
Stall
prevention
selection
during
deceleration
If
using
the
dynamic
brake
option
(Braking
Resistor,
Braking
Resistor
Units,
and
Brak-
ing
Units),
be
sure
to
set
parameter
L3-04
to
0
(disabled)
or
3
(enabled
with
Braking
Resistor).
0
to
31
5-60
6-25
Table 4.2 Parameters that must be set (Continued)
Parame-
ter Num-
ber
Name Description Setting Range
Factory
Setting
Page

 Loading...
Loading...






