331
If the manipulated variable after the PID action exceeds the upper limit, the
Greater Than (>) Flag (A50005) will turn ON and the result will be output at the
upper limit. If the manipulated variable after the PID action is less than the lower
limit, the Less Than (<) Flag (A50007) will turn ON and the result will be output at
the lower limit.
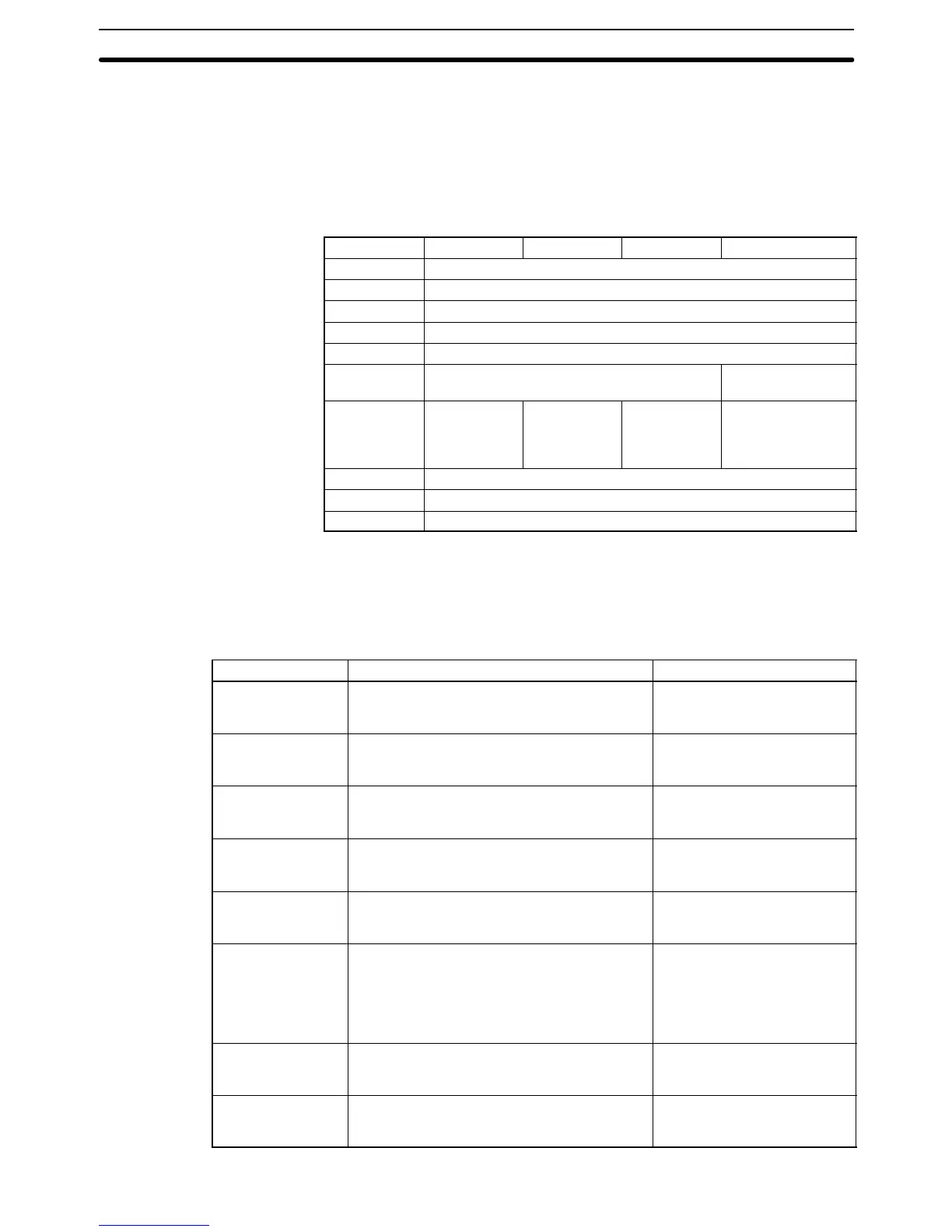
PID parameter words range from C through C+38. The PID parameters are con-
figured as shown below.
Word 15 to 12 11 to 8 7 to 4 3 to 0
C Set value (SV)
C+1 Proportional band (P)
C+2 Tik = Integral constant (See note.)
C+3 Tdk = Derivative constant (See note.)
C+4 Sampling period (τ)
C+5
2-PID parameter (α)
PID forward/
reverse designation
C+6 Manipulated
variable
output limit
control
Input range Integral and
derivative unit
Output range
C+7 Manipulated variable output lower limit
C+8 Manipulated variable output upper limit
C+9 to C+38 Work area (Cannot be accessed directly from program.)
Note The values set for words C+2 and C+3 will vary according to the unit designated
in bits 04 to 07 of C+6.
Parameters
Item Contents Setting range
Set value (SV) The target value of the process being
controlled.
Binary data (of the same
number of bits as specified for
the input range)
Proportional band The parameter for P action expressing the
proportional control range/total control range.
0001 to 9999 (4-digit BCD);
(0.1% to 999.9%, in units of
0.1%)
Tik A constant expressing the strength of the
integral action. As this value increases, the
integral strength decreases.
0001 to 8191 (4-digit BCD);
(9999 = Integral operation not
executed) (See note 1.)
Tdk A constant expressing the strength of the
derivative action. As this value increases, the
derivative strength decreases.
0001 to 8191 (4-digit BCD)
(0000 = Derivative operation
not executed) (See note 1.)
Sampling period (τ) Sets the period for executing the PID action. 0001 to 9999 (4-digit BCD);
(0.01 to 99.99 s, in units of
10 ms)
2-PID parameter
(α)
The input filter coefficient. Normally use 0.65
(i.e., a setting of 000). The filter efficiency
decreases as the coefficient approaches 0.
000: α = 0.65
Setting from 100 to 199
means that the value of the
rightmost two digits is set from
α= 0.00 to α= 0.99. (See note
2.)
PID
forward/reverse
designation
Determines the direction of the proportional
action.
0: Reverse action
1: Forward action
Manipulated
variable output limit
control
Determines whether or not limit control will
apply to the manipulated variable output.
0: Disabled (no limit control)
1: Enabled (limit control)
PID and Related Instructions Section 5-24