Digital input/ output parameter group 03
PARAMETER DESCRIPTION 87
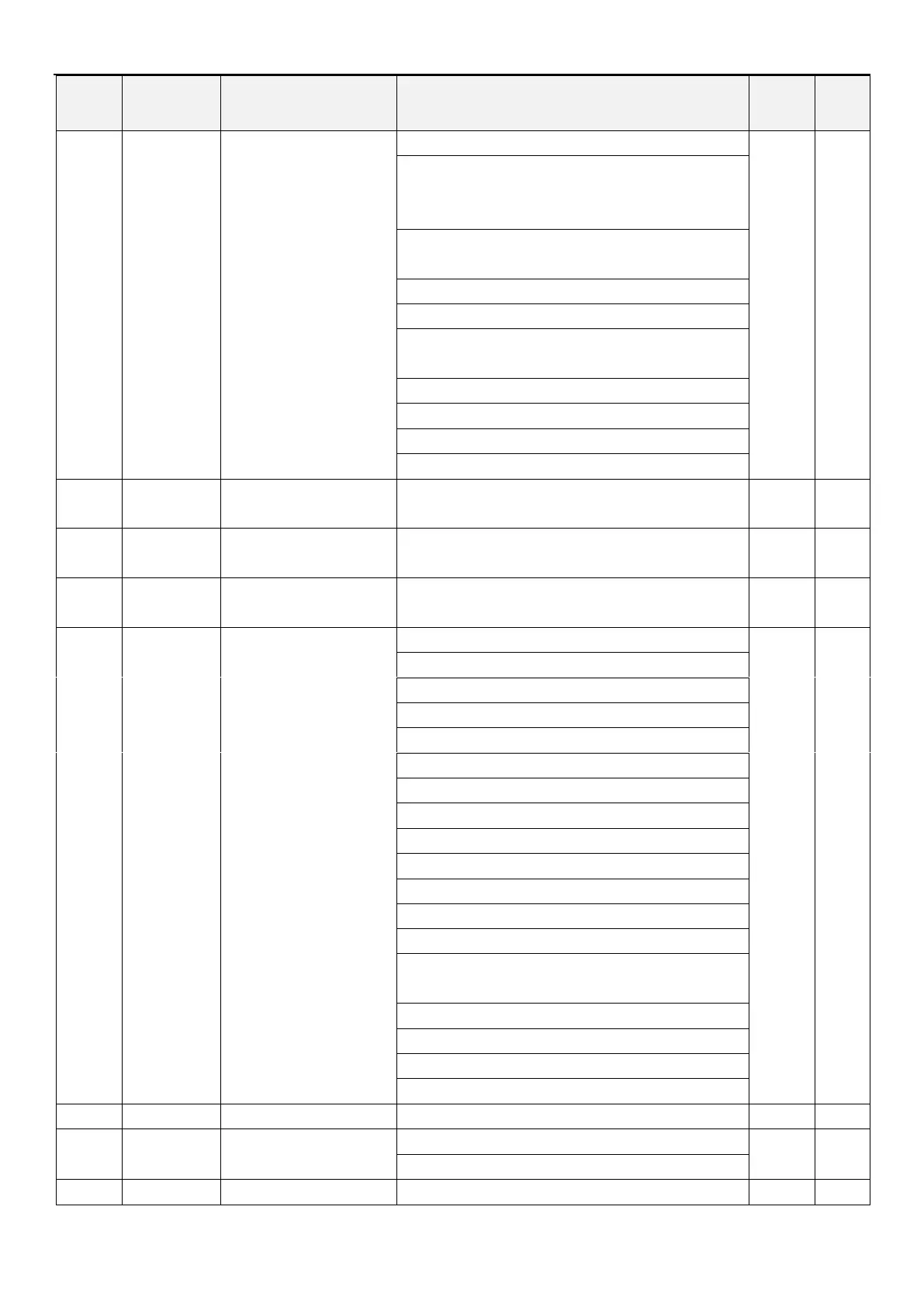
Terminal STF input
function
39: STF/STR +STOP (Use with RUN signal, when ON,
motor runs reverse, when OFF, motor stops then runs
forward.)
40: P_MRS (Stops inverter output immediately by
pulse signal input)
43: RUN_EN (Enable digital input terminal operation)
44: PID_OFF (Enable digital input terminal turning off
PID)
45: Second frequency command source mode
92:Fire mode command 1( RUN command included)
93:Fire mode command 2( RUN command excluded)
Terminal STR input
function
Terminal M0 input
function
Terminal M1 input
function
Terminal A-C output
function
0: RUN(Output when inverter running)
1: SU(Output when reach target frequency)
2: FU(Output when reach 03-21 03-22 value )
3: OL(Output when overload)
4: OMD(Output when output current is zero)
5: ALARM(Output when alarm)
6: PO1(Output when in program operation step)
7: PO2(Output when in program operation cycle)
8: PO3(Output when in program operation pause)
11:OMD1(Output when output current is zero 1)
12 :OL2(Output when over torque)
17: RY(Output when inverter is powered on and no
alarm)
18: Output when it’s time for maintenance
41:PID feedback disconnection (AErr) alarm
0:Terminal A-C output positive logic
2:Terminal A-C output negative logic

 Loading...
Loading...