5
05.01
5-100
Siemens AG 2001 All rights reserved
SIMODRIVE 611 Planning Guide (PJU) – 05.01 Edition
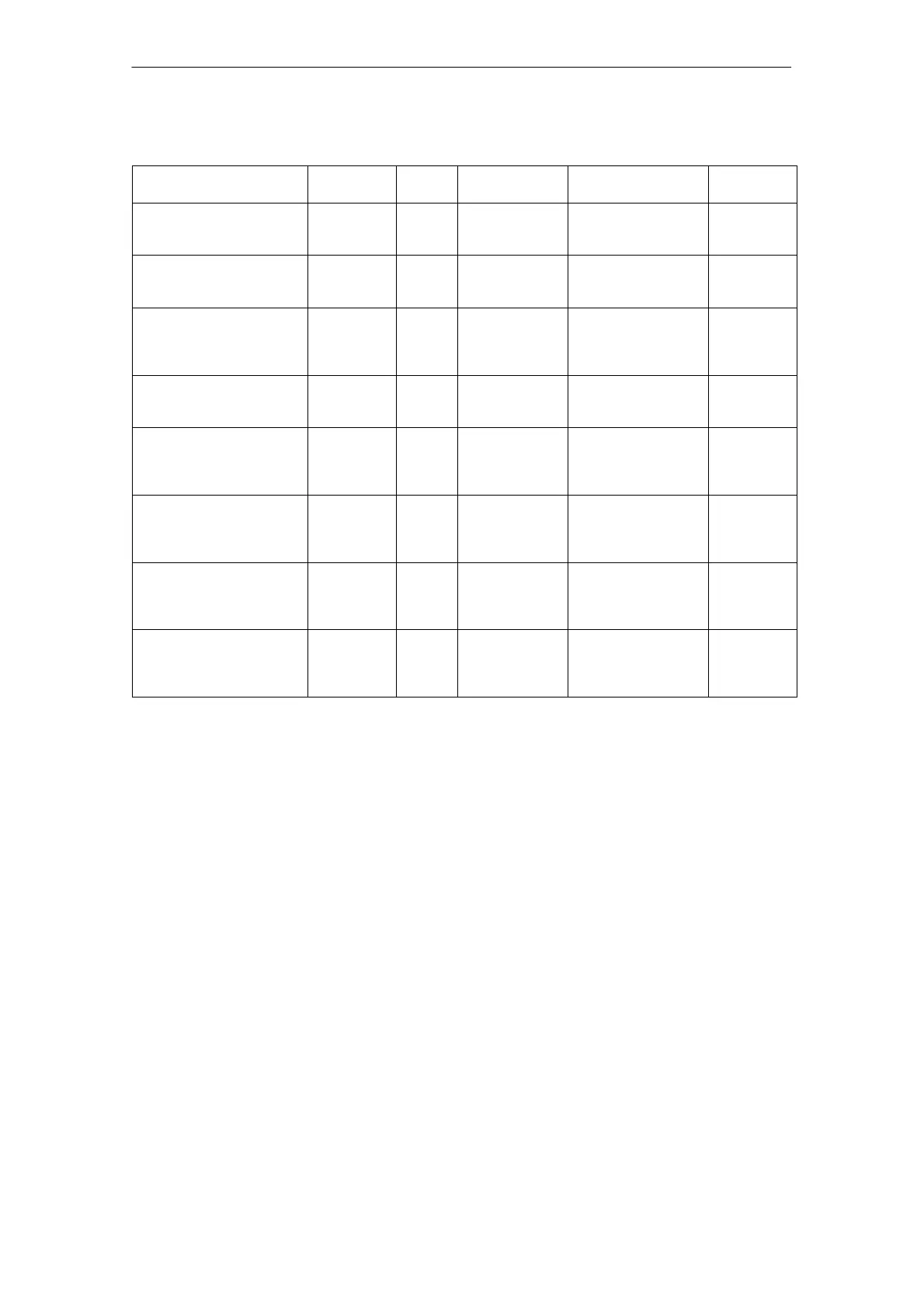
Table 5-1 Overview of control modules
Control board Optional
interfaces
Motors
1)
Motor encoderAxesVersion
SIMODRIVE 611
with analog setpoint interface
for feed drives
1 Resolver SRM: 1FK6, 1FT6
SIMODRIVE 611
with analog setpoint interface
for feed drives
2 Resolver SRM: 1FK6, 1FT6
SIMODRIVE 611
with analog setpoint interface
for main spindle drives
Incremental
encoder sin/cos 1
V
pp
SIZAG 2
ARM: 1PH
SIMODRIVE 611
with analog setpoint interface
for induction motors
ARM RS 232 C
SIMODRIVE 611
with digital setpoint interface
for FD and MSD
Performance
control
1 Incremental
encoder sin/cos 1
V
pp,
EnDat, SSI
(from SW 5.1.9)
SRM: 1FT6,1FK6,1FE1
ARM: 1PH
SLM: 1FN1, 1FN3
Third–party: if suitable
SIMODRIVE 611
with digital setpoint interface
for FD
Performance
control
2 Incremental
encoder sin/cos 1
V
pp,
EnDat, SSI
(from SW 5.1.9)
SRM: 1FT6,1FK6,1FE1
ARM: 1PH
SLM: 1FN1, 1FN3
Third–party: if suitable
SIMODRIVE 611
with digital setpoint interface
for FD and MSD
Standard 2
control
2 Incremental
encoder sin/cos 1
V
pp,
EnDat
SRM: 1FT6,1FK6,1FE1
ARM: 1PH2/–4/–6/–7
SLM: 1FN1, 1FN3
Third–party: if suitable
SIMODRIVE 611
with digital setpoint interface
for hydraulic/analog linear
drives HLA/ANA
2 Incremental
encoder sin/cos 1
V
pp
, EnDat, SSI
(from SW 1.2.4)
Hydraulic linear axes
1) SRM: Rotating synchronous motor
ARM: Rotating induction motor
SLM: Synchronous linear motor
Third–party: Third–party motor
5 Control Modules

 Loading...
Loading...










