5
05.01
5.4 Main spindle control with analog setpoint interface 6SN1121–0BA1_–0AA_
5-117
Siemens AG 2001 All rights reserved
SIMODRIVE 611 Planning Guide (PJU) – 05.01 Edition
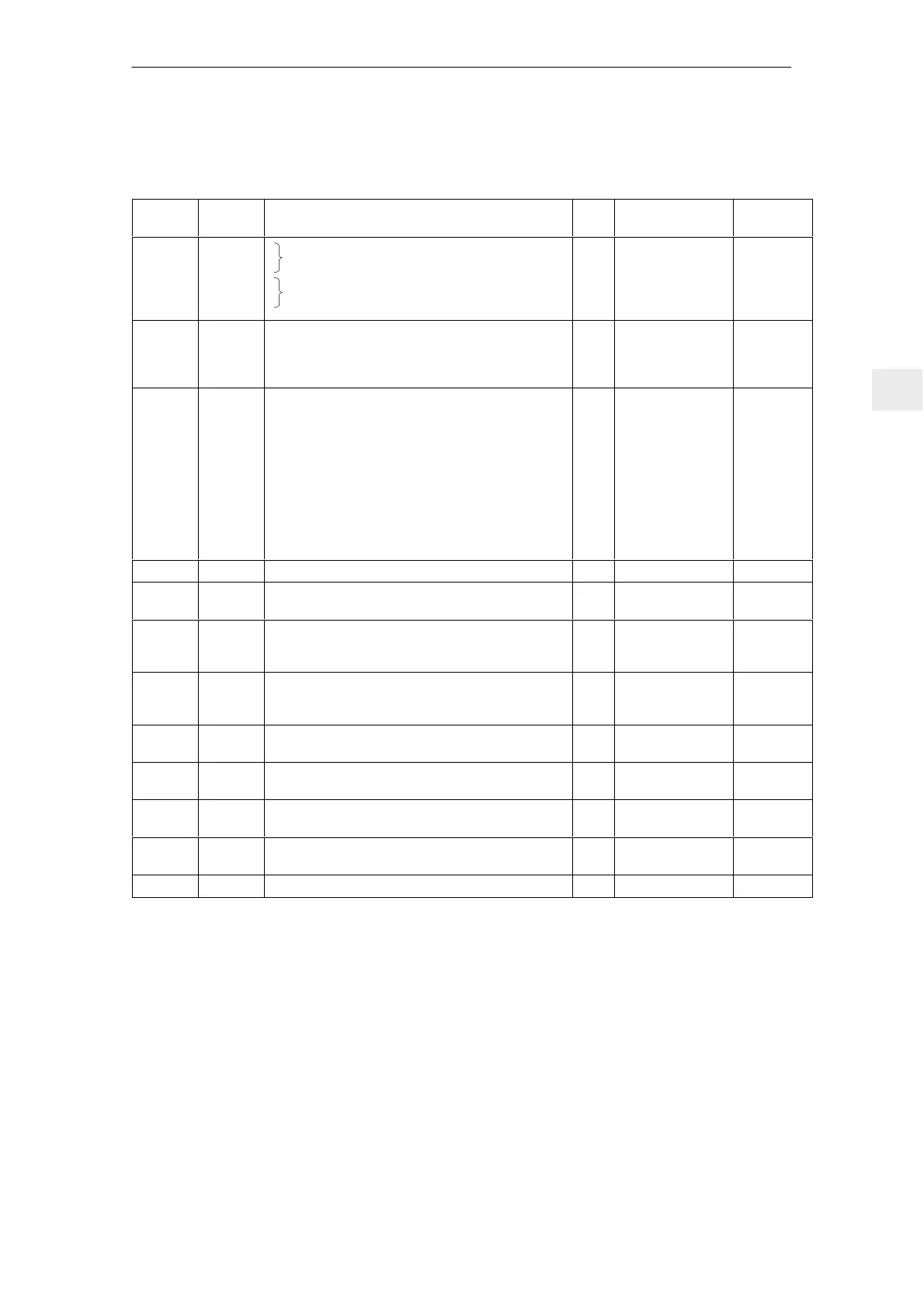
5.4.3 Interface overview, main spindle control
Table 5-12 Interface overview, main spindle control
Term.
No.
Desig. Function
Type
1)
Typ. voltage/
limit values
Max.
cross–sect.
56
14
24
8
X421
X421
X421
X421
Speed setpoint 1
5)
Differential input
5)
Speed setpoint 2
5)
Differential input
5)
(C axis or supplementary setpoint)
I
I
I
I
0 V ... ±10 V
max. 0.5 A
0 V ... ±10 V
max. 0.5 A
1.5 mm
2
1.5 mm
2
1.5 mm
2
1.5 mm
2
A91
M
A92
M
X451
X451
X451
X451
Analog input DA1 (n
act
)
Reference voltage for DA1
Analog input DA2 (utilization)
Reference voltage for DA2
I
I
I
I
–10 V ... +10 V
max. 3 mA
–10 V ... +10 V
max. 3 mA
1.5 mm
2
1.5 mm
2
1.5 mm
2
1.5 mm
2
9
663
65
81
X431
X431
X431
X431
Enable potential 6)
Pulse enable
Controller enable: To power–up the drives, in addition
to terminal 65, terminals 663 and 81 must also be
energized. If terminal 65 is opened, the motor brakes
with the selected deceleration time (ramp–down time).
The pulses are canceled when n
min
is fallen below.
Ramp–function generator fast stop: The motor brakes
along the torque limit after terminal 81 has been ope-
ned. When n
min
is fallen below, either the pulses are
canceled, or the motor remains magnetized.
O
I
I
I
+24 V
+21 V ... 30 V
+13 V ... 30 V
+13 V ... 30 V
1.5 mm
2
1.5 mm
2
1.5 mm
2
1.5 mm
2
E1 to E9 X431 Freely–programmable select terminals I +13 V ... 30 V 1.5 mm
2
AS1
AS2
X441
X441
Relay, start inhibit (checkback signal, terminal 663)
Relay, start inhibit (checkback signal, terminal 663)
NC
max.250V
AC
/1A
30 V
DC
/2 A
1.5 mm
2
1.5 mm
2
A11 to
A61
289
X441
X441
Freely–programmable relay signals
Relay contact supply
NO
I
30 V
DC
/1 A
30 V
DC
/6 A
1.5 mm
2
1.5 mm
2
672
673
674
X441
X441
X441
Axis–specific signal
Ready or no fault
NO
I
NC
30 V
DC
/1 A
30 V
DC
/1 A
30 V
DC
/1 A
1.5 mm
2
1.5 mm
2
1.5 mm
2
RS 232C X411 Serial interface for computer–supported start–up
(start–up program)
D–Sub
9–pin
X432 Spindle encoder input, BERO or
motor encoder output
2)3)
D–Sub
15–pin
X433 BERO connection
2)3)4)
D–Sub, 9
pin.
X412 Motor encoder D–Sub, 15
pin
X151 Equipment bus
1) I=input; O=output; NC=NC contact; NO=NO contact (for signal: Closed=high, open=low)
2) The BERO can either be connected to X433 or to X432.
3) X433 is only available for Order No.: 6SN1121–0BA11–0AA1.
4) BERO type: 3–conductor PNP NO contact, e.g. BERO M30 Order No.: 3RG4014–0AG01 or
BERO M12 Order No.: 3RG4012–3AG01
The BERO cable must be shielded.
5) The cable shields of setpoint cables must be connected at both ends.
6) The terminal may only be used to enable the associated drive group.
5 Control Modules

 Loading...
Loading...










