5
05.01
5.1 Feed control with user–friendly and analog setpoint interface 6SN1118–0AA11–0AA1
5-102
Siemens AG 2001 All rights reserved
SIMODRIVE 611 Planning Guide (PJU) – 05.01 Edition
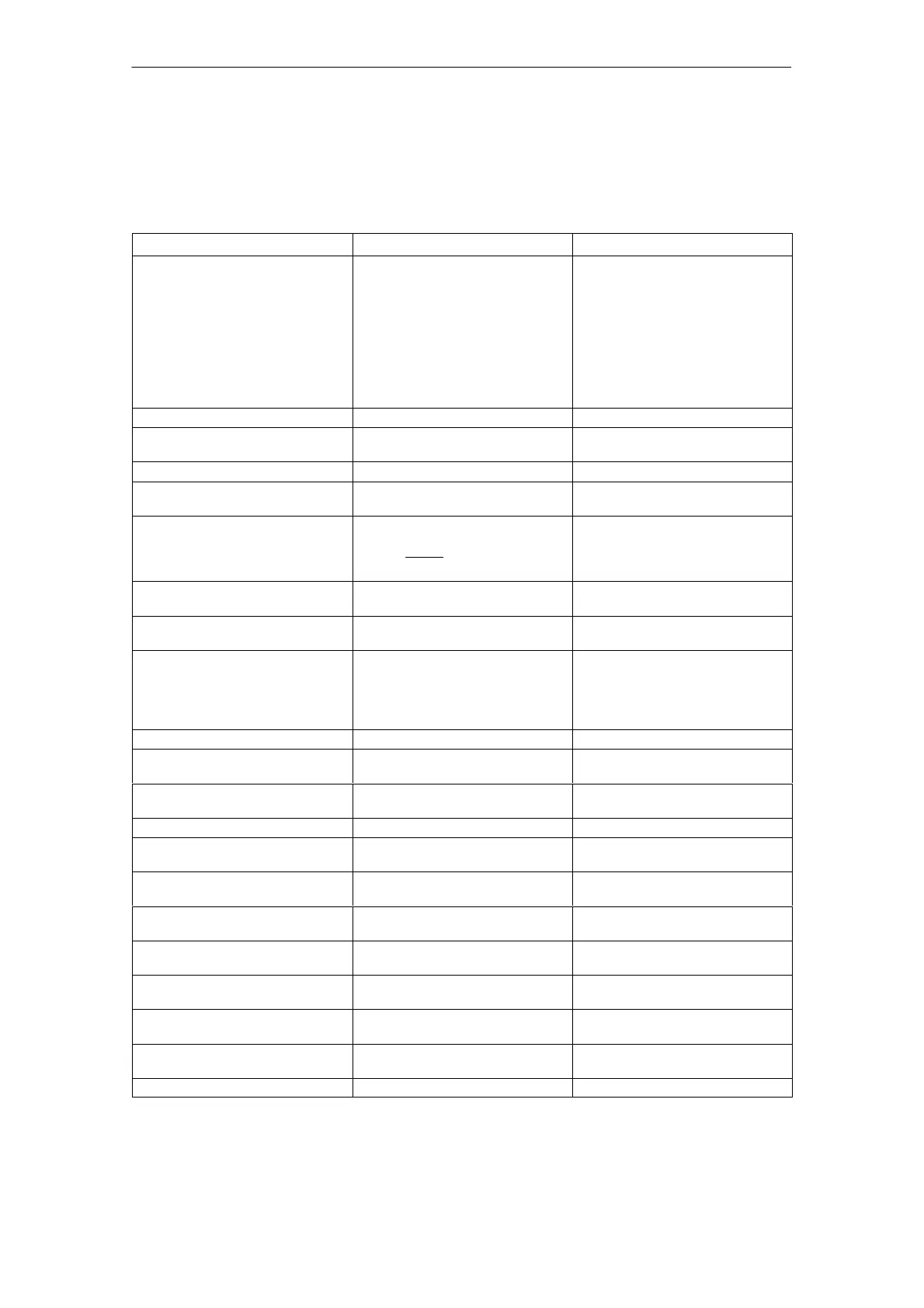
5.1.1 Function overview and settings using the parameter board
6SN1114–0AA01–0AA1
Table 5-2 Function overview and settings using the 6SN1114–0AA01–0AA1 parameter module
Parameter Value range Setting elements
Speed controller
Integral action time
Proportional gain
Adaptation:
S Integral action time
S Proportional gain
S Adaptation range
T
N
= 7...43 ms
Kp = 2...150
T
Nadap
/T
N
= 0.04...1
Kp
adap
/Kp = 4...35
n
x2
– n
x1
= 0 – 0...(65 – 330) mV
Front panel potentiometer T
N
,
additionally C2
Front panel potentiometer Kp,
additionally R50
R34 and front panel potentiom. ADAP
R38
R40
Drift compensation (offset) –30...+30 mV (referred to n
set
) Front potentiometer, drift
Direction of rotation reversal Clockwise/counter–clockwise rotation
for pos. n
set
S2.1
Tachometer adaptation V
tach.
= 40...15 V/n
rated
Switch S1; additionally R6, R7, R8
Tachometer adjustment n
actN
= 2.2...0.7 ⋅ n
act
(n
act
= 10 V/n
rated
)
Front panel potentiometer tachometer;
additionally R3 and R10
Speed setpoint adaptation
(speed reduction)
100 % ⋅ 11...5 V= n
actN
or
(only term.56/14)
10 V =
n
actN
1...100
R5
Inhibit I component Speed controller without
I component
Terminal 6
Limit I component, speed
controller
I component fully effective ... ineffec-
tive
R52
Current controller
Adaptation motor/power module
Current actual value normalization
Current controller gain
I
max
= 23...100 % ⋅ I
limit
Kp(I) = 0.5...11.5;
S2.2....S2.5
S2.6...S2.9; additionally R15, if
K
p
(I) > 11.5
Current setpoint adaptation I
max
= 10...0 V R42
Inhibit I component in current–
controlled operation
Current controller without I component R1
Select current–controlled operation offline
online via terminal 22
S2.10
R14
Master/slave operation Up to 5 slave modules Terminals 258, S2.10, R42, R44
Response threshold, I
2
t limiting,
reduction
6...55 % ⋅ I
limit
R9
Monitoring time, speed controller at its
endstop
26...1200 ms R54
Monitoring, speed controller at its end-
stop
ON ↔ OFF R32
External current setpoint limiting
(e. g. travel to endstop)
1...100 % ⋅ I
max
speed controller monitoring OFF
Terminal 96 (variable); R12 (fixed)
Current limiting after the monitoring
time, speed controller at its endstop
1...100 % ⋅ I
max
R2, R32
Current limiting after the I
2
t timer has
expired
Refer to I
2
t limiting in the
Start–up Guide
R2/R32
Torque limiting for setting–up opera-
tion via terminal 112 (NE module)
1...100 % ⋅ I
max
speed controller monitoring OFF
R12
Electrical weight equalization I
set,
suppl.
= 0...50 % ⋅ I
max
R46/R48
5 Control Modules

 Loading...
Loading...










