5
05.01
5.6 Drive control with digital setpoint interface
5-126
Siemens AG 2001 All rights reserved
SIMODRIVE 611 Planning Guide (PJU) – 05.01 Edition
Notice
When using non–PELV circuits connected to terminals AS1, AS2, the connec-
tor must be prevented from being incorrectly inserted using plug coding (refer
to EN60204–1, Section 6.4).
Order No. of the coding, refer to Catalog NC 60.
!
Warning
Only PELV circuits may be connected to terminal 19.
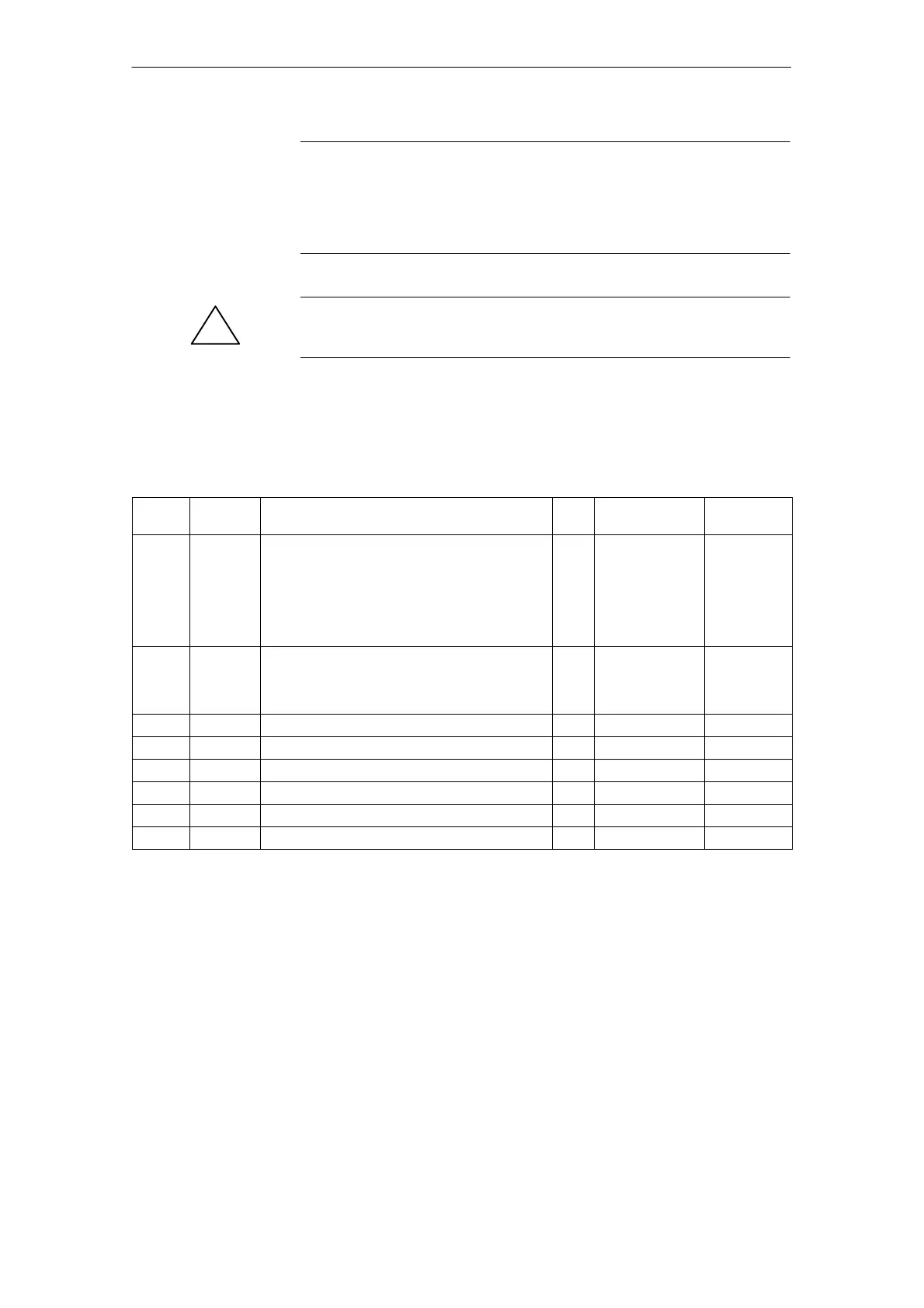
5.6.1 Interface overview, drive control
Table 5-16 Interface overview, drive control
Term.
No.
Desig. Function
Type
1)
Typ. voltage/
limit values
Max. cross–
sect.
9
663
AS1
AS2
X431
X431
X431
X431
Enable potential 2)
Pulse enable: The ”start inhibit” relay is switched
using terminal 663; when it opens, the gating pulses
are inhibited and the motor is switched into a no–
torque condition.
Relay, start inhibit (feedback signal. term. 663)
Relay, start inhibit (feedback signal, term. 663)
O
I
NC
+24 V
+21 V ... 30 V
max. 250VAC/1A
30 VDC/2 A
1.5 mm
2
1.5 mm
2
1.5 mm
2
1.5 mm
2
B1
19
B2
9
X432
X432
X432
X432
Input, external zero mark (BERO) axis 1
negative enable potential
Input, external zero mark (BERO) axis 2
positive enable potential 2)
I
O
I
O
+13 ... 30 V
0 V
+13 ... 30 V
+24 V
1.5 mm
2
1.5 mm
2
1.5 mm
2
1.5 mm
2
X411 Motor encoder, axis 1
X412 Motor encoder, axis 2
X421 Direct position encoder axis 1
X422 Direct position encoder axis 2
X151 Equipment bus (not labeled on the front panel)
X141/341 Drive bus
1) I=Input; O=Output; NC=NC contact; NO=NO contact (for signal NO=High/NC=Low)
2) The terminal may only be used to enable the associated drive group.
5 Control Modules

 Loading...
Loading...










