GAPS - User Guide
8.3 L-USBL-INS Mode
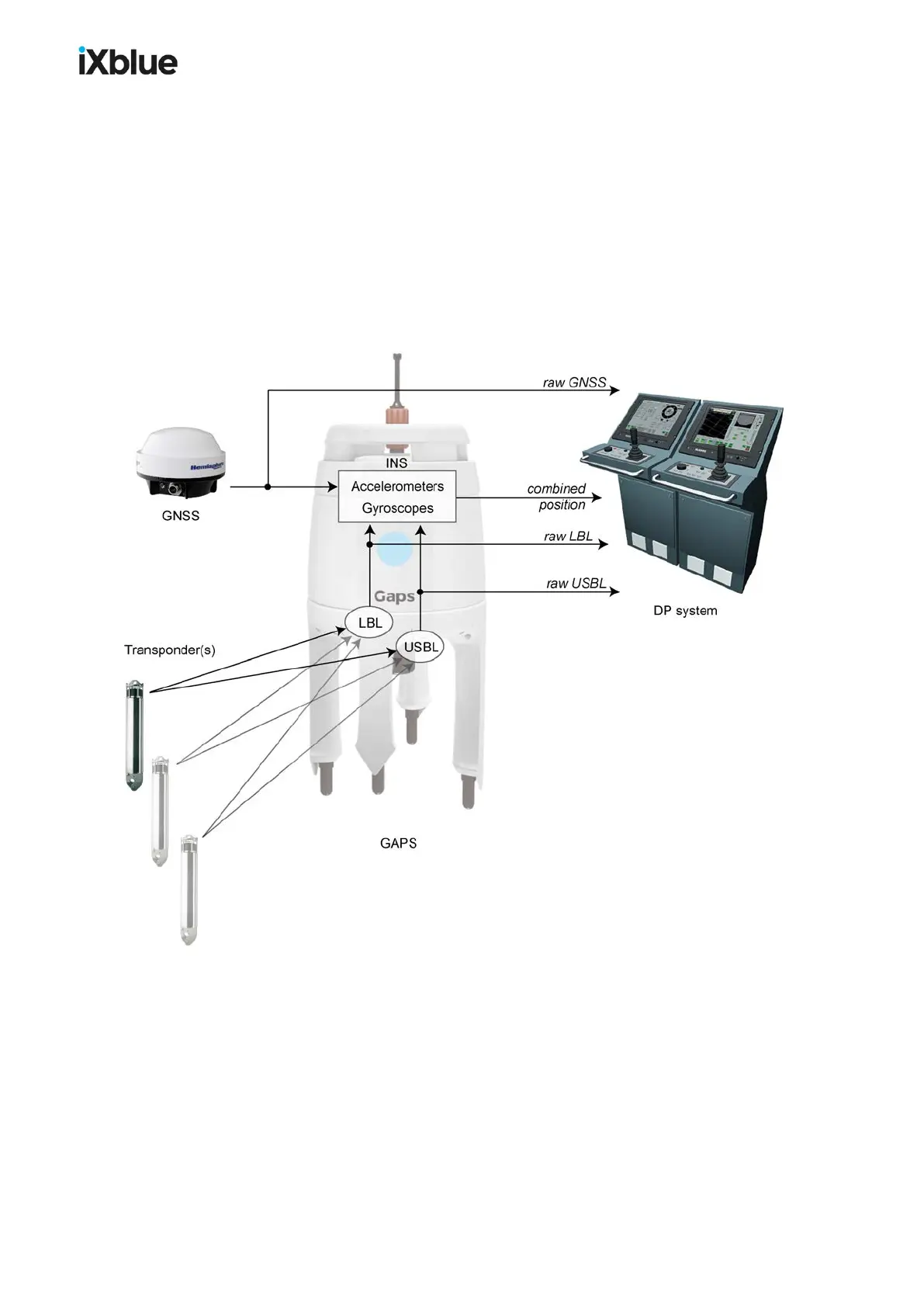
In this mode, the INS included in GAPS becomes the core component of the positioning
system. The INS performs the fusion of all available sensors:
● Accelerometers and Gyroscopes of the INS
● LBL range from fixed moored transponders
● USBL position to a fixed moored transponder
● GNSS absolute position of the vessel
The INS provides the combined position of all above sensors. The INS improves the
robustness, redundancy, reliability and accuracy of the global position.
Figure 70 - Data fusion of GAPS INS
There is no constraint on the number of transponders to deploy. Only a single transponder can
be used. The addition of several transponders increases the redundancy and accuracy of the
final position. Figure below presents examples of performances that can be reached
depending on the number of deployed transponders.
MU-GAPS-AN-005-H - November 2019 137