GAPS - User Guide
I.19 PIFM-POPSN
$PIFM,POPSN,JJ/MM/AAAA,HH:MM:SS,DDD,ddd.dd,±vv.vv,±vv.vv,CCCC,nn,
JJ/MM/AAAA,HH:MM:SS.DDD,s,dd,mm.mmmm,s,ddd,mm.mmmm,mmmm,c,c, mmmm,
[CR][LF]
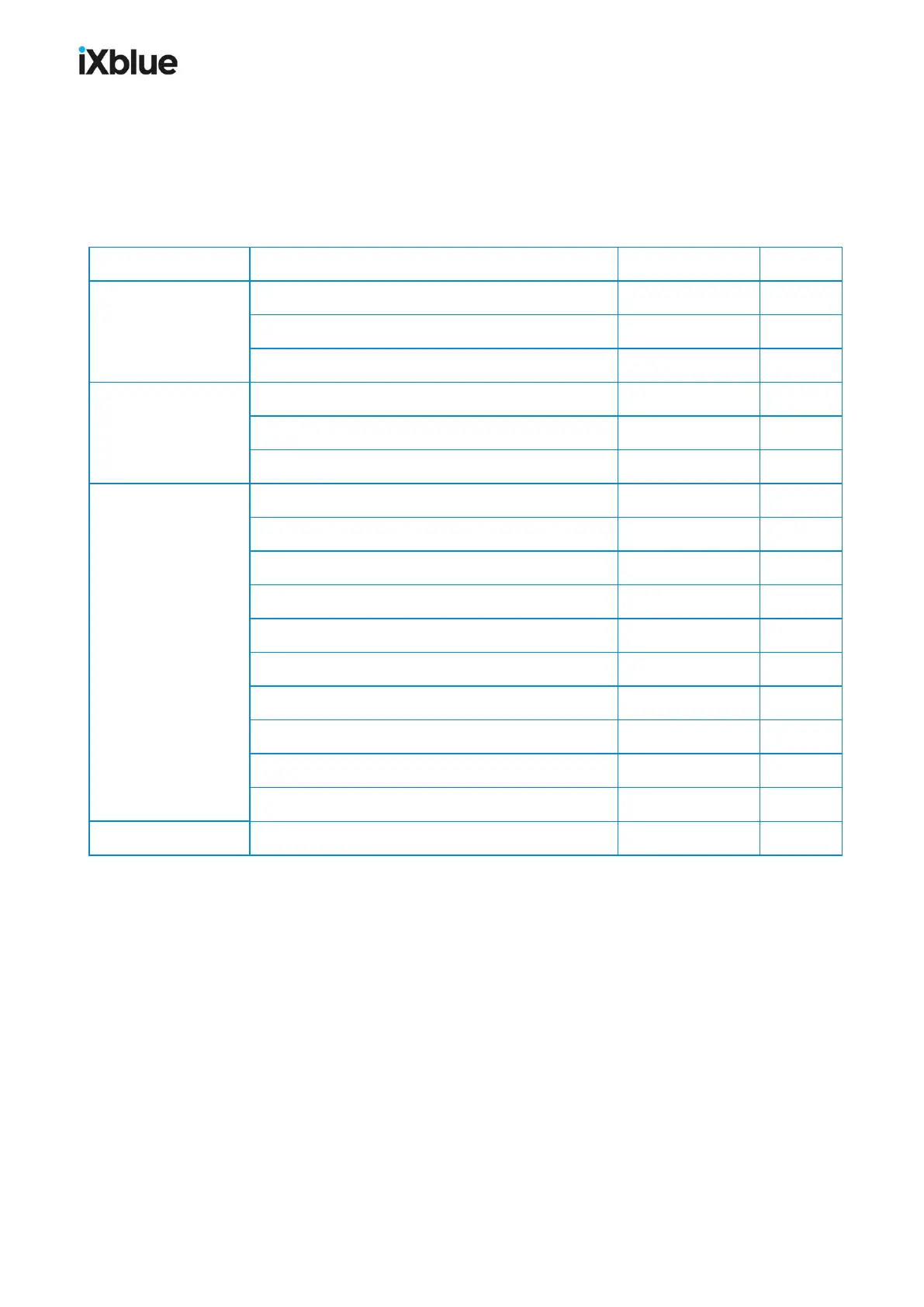
Message Format Bytes
Header ID $PIFM,POPSN, 12
Date JJ/MM/AAAA, 11
Time HH:MM:SS,DDD, 13
Heading, Speed Heading (0 à 360), degrees ddd.dd, 7
Speed X, knots ±vv.vv, 7
Speed Y, knots ±vv.vv, 7
Transponder or other
Mobile Device
Position
Transponder or mobile device ID * 4 characters, 5
Transponder number nn, 3
Position date JJ/MM/AAAA, 11
Time position HH:MM:SS.DDD, 13
Latitude in degrees, s is the latitude sign s,dd,mm.mmmm, 13
Longitude in degrees, s is the longitude sign s,ddd,mm.mmmm, 14
Depth, meters mmmm, 5
Validity X, Y (F valid and 0 for invalid) c, 2
Validity Z (0: invalid, 1: computed value, 2: measure) c, 2
Depth sensor data, meters mmmm, 5
Message End End [CR][LF] 2
* ID: transponder ID in 4 characters (example for transponder 1: «0001 », for transponder 26: «
0026 »)
J GAPS PHINS Lever Arm
The offset between GAPS and PHINS configuration files is:
X1 = +0.019, X2 = +0.002, X3 = +0.03
226 MU-GAPS-AN-005-H - November 2019