Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 114 of 909
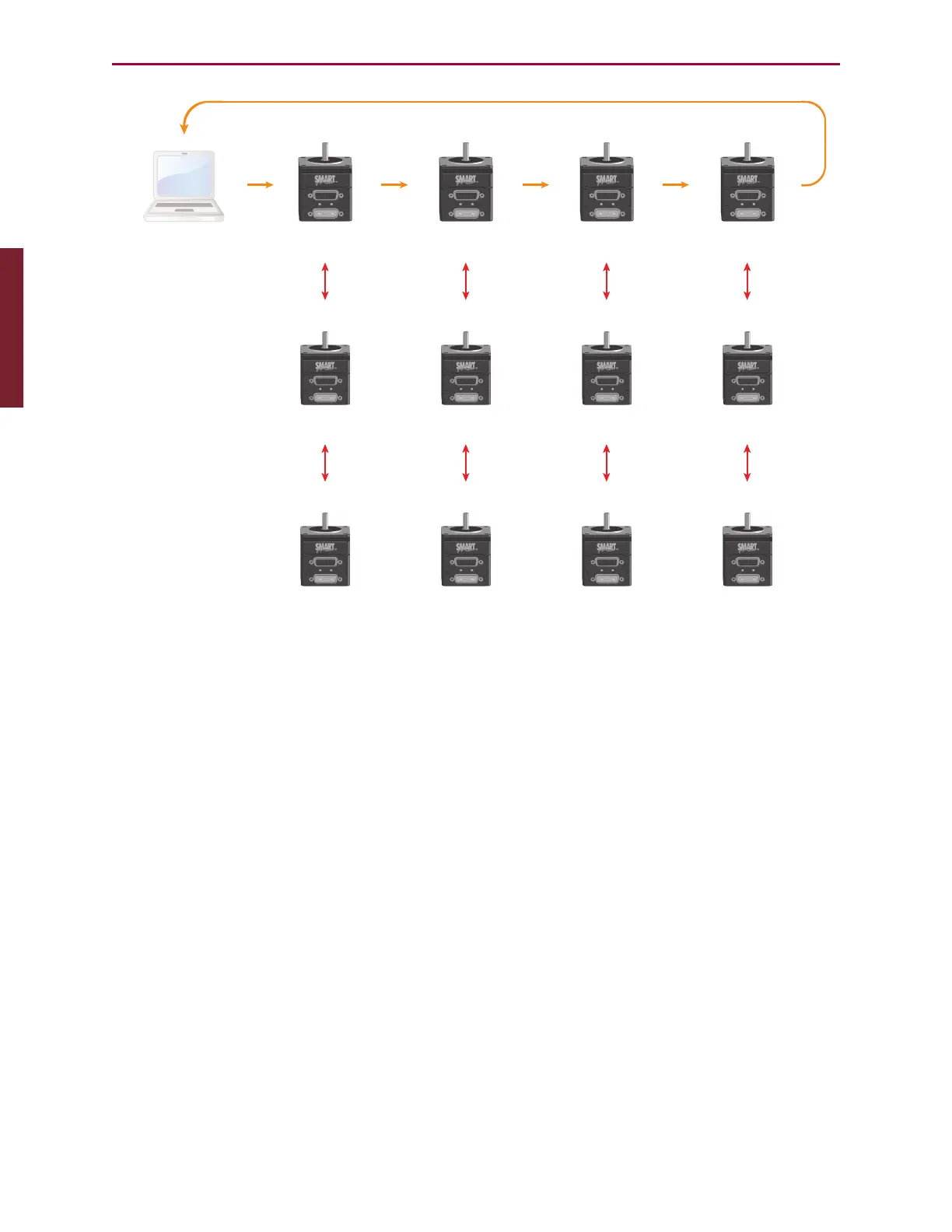
RS-232
Combitronic
Master
Combitronic
Master
Combitronic
Master
Combitronic
Master
Bank 1 Bank 2 Bank 3 Bank 4
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Combitronic
Slave
Controlling
PC
RX
TX
Motor 2 Motor 2 Motor 2 Motor 2
Motor 3 Motor 3 Motor 3 Motor 3
TX RX TX RX TX RX TX RX
RS-232 and Combitronic Networks
Example SMI software commands from the host PC RS-232 port for the system layout in the
previous figure:
2PT:3=1234
Motor 2 sets target position of Motor 3 in its group to 1234
3PT:0=0
Motor 3 sets target position of all motors in its group to zero
4PT=345
Motor 4, only, gets its own target position set to 345
0G
Motor 1, 2, 3 and 4 receive Go command
0G:0
All motors on RS-232 and all network Combitronic motors receive Go
command
Part 1: Programming: Combitronic with RS-232 Interface