Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 251 of 909
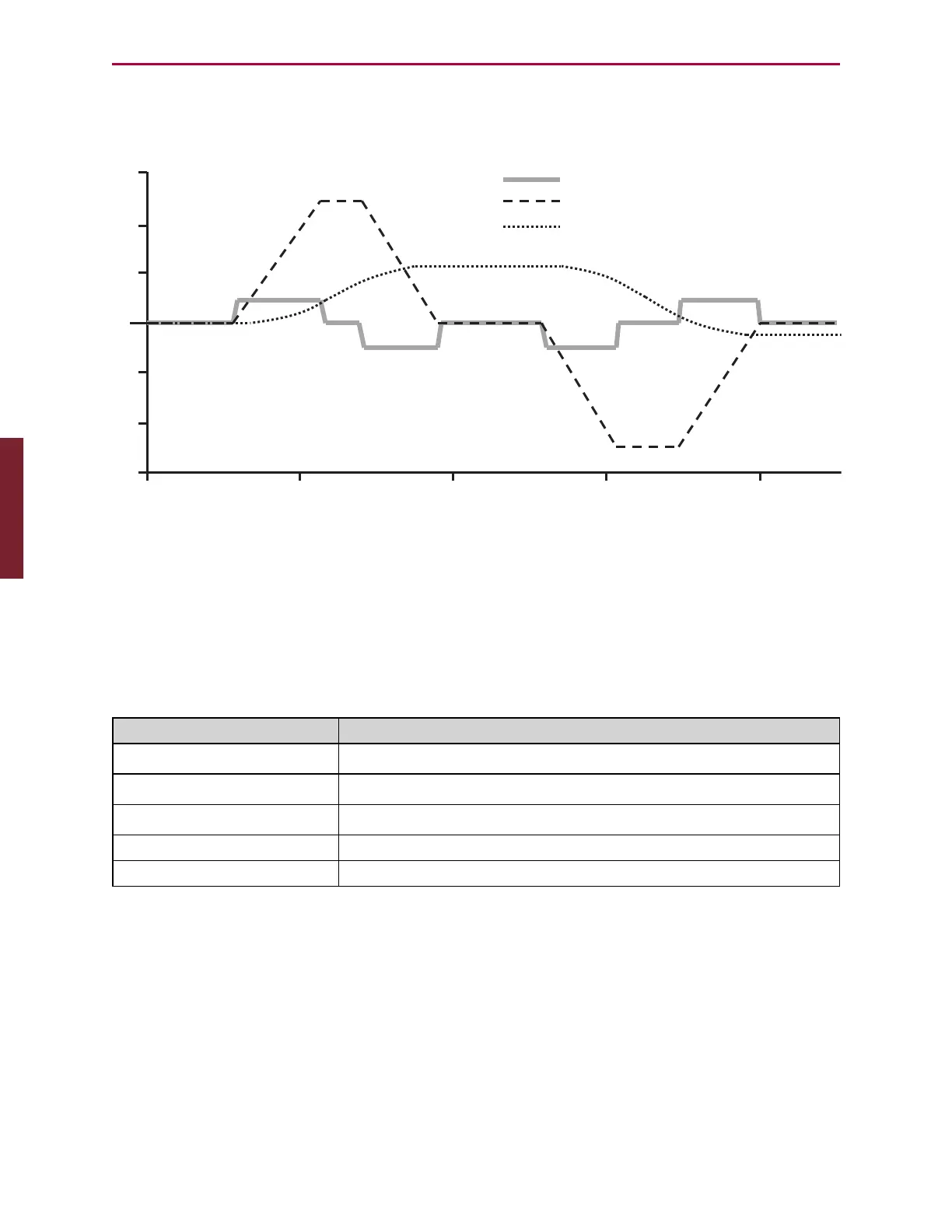
Also, refer to the following figure, which shows the sign (positive or negative) of the reported
commanded-acceleration value compared to command velocity and command position.
+
-
AC, RAC Commanded Acceleration
VC, RVC Commanded Velocity
PC, RPC Commanded Position
Parameter:
0
Reported Sign of AC (Commanded Acceleration) Compared to VC and PC
Equations for Real-World Units:
Encoder resolution and sample rate can vary. Therefore, the following general equations can
be used to convert the value of AC to various units of acceleration. These equations force
floating-point calculations to avoid overflow and maintain resolution. They can be placed in a
user program, or they can be precalculated if the values of SAMP and RES are known (SAMP
and RES can be reported from the terminal using the RSAMP and RRES commands,
respectively). SAMP can change if the PID command is used. The value of REScan differ
between motor models.
Output Equation
Radians/(Sec
2
) =AC*PI*2*((((SAMP*1.0)*SAMP)/65536.0)/RES)
Encoder Counts/(Sec
2
) =AC*(((SAMP*1.0)*SAMP)/65536.0)
Rev/(Sec
2
) =AC*((((SAMP*1.0)*SAMP)/65536.0)/RES)
RPM/Sec =AC*60.0*((((SAMP*1.0)*SAMP)/65536.0)/RES)
RPM/Min =AC*3600.0*((((SAMP*1.0)*SAMP)/65536.0)/RES)
EXAMPLE:
ADT=10
VT=100000
MV
G
WAIT=10 'Wait to make sure move has started
WHILE AC>0
LOOP
PRINT("Acceleration Complete",#13)
Part 2: Commands: AC