Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 661 of 909
Position target Y = 2000
Motor address X = 5
Motor address Y = 7
PTS(1000;5,2000;7) 'X axis and Y axis
The synchronized motion is initiated with a GS command.
It is important to ensure that the target position in each motor is equal to the motor's current
position. The best way to ensure this is to use an absolute position move (using PT=) in all
participating motors before issuing the PTS command. For more details, see Synchronized
Motion on page 175.
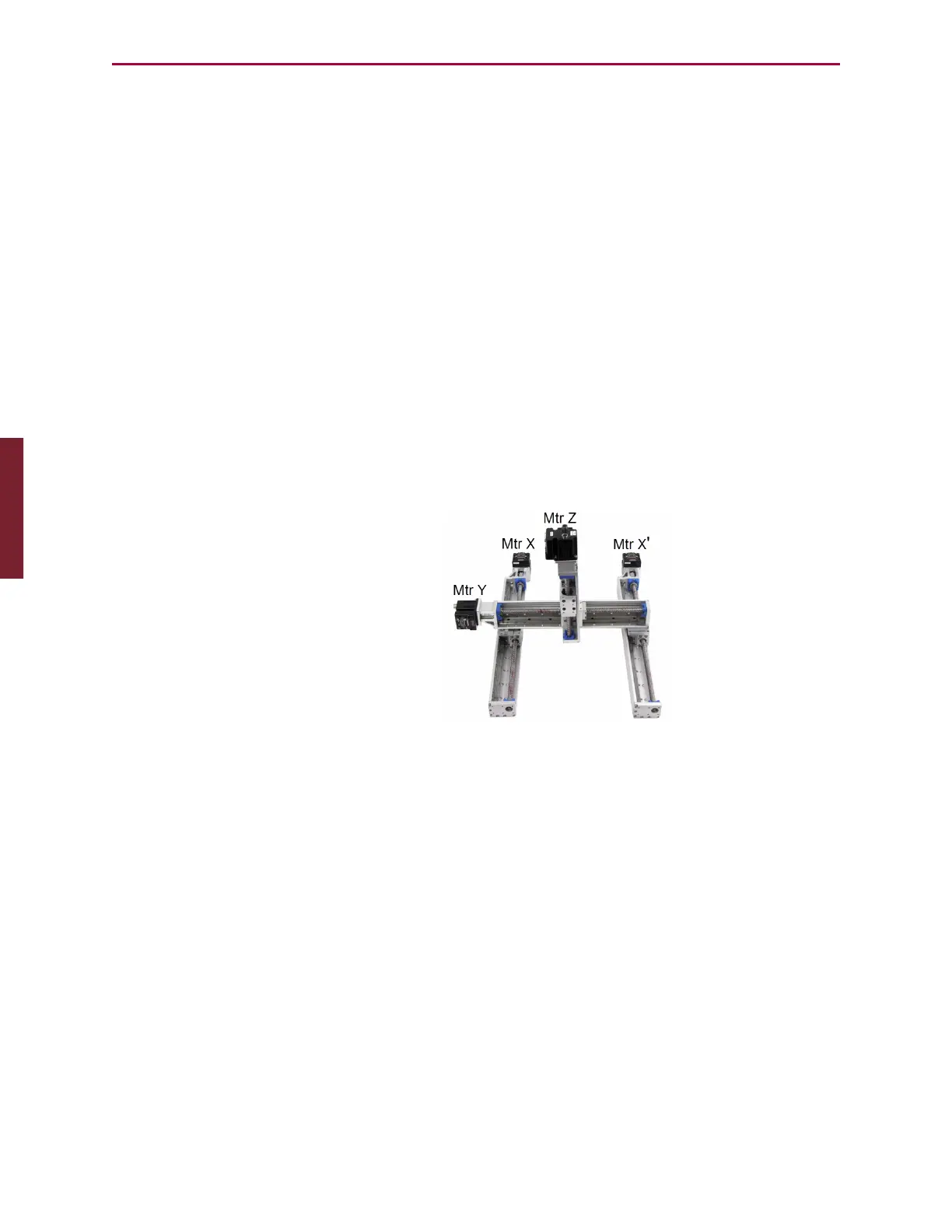
Some gantry-type, multiple-axis machines have two motors operating the same axis of
motion (see the next figure). The following is the full syntax for the PTS command, which
shows additional/optional parameters (enclosed in braces "{}") for support of two motors
operating the same axis. The optional parameter contains the motor address for the second
motor of the axis. (For the PRTScommand, replace PTS with PRTS.)
PTS(pos1;addr1{;addr1'},pos2;addr2{;addr2'}[,pos3;addr3{;axis3'}])
This is illustrated in the following examples. (If you are using the PRTS command, substitute
PRTS in place of PTS below.)
Position target X = 2000
Position target Y = 1000
Position target Z = 500
Motor address X = 5
Motor address X' = 6
Motor address Y = 7
Motor address Z = 8
PTS(2000;5;6,1000;7) 'Two-motor X axis (X, X'), plus Y axis
PTS(2000;5;6,1000;7,500;8) 'Two-motor X axis (X, X'), plus Y & Z axes
In these cases, the same position, velocity and acceleration data sent to motor address 5 is
also sent to motor address 6, with both motors driving the gantry's X axis.
EXAMPLE: (Configures and starts a synchronized move)
ADTS=100 'Set target synchronized accel/decel
VTS=100000 'Set target synchronized velocity
x=1000 y=2000 z=500 a=100 b=200
PTS(x;1,y;2,z;3) 'Set next positions, axes 1, 2 & 3
PTSS(a;4) 'Set supplemental position, axes 4
PTSS(b;5) 'Set supplemental position, axes 5
GS 'Go, starts the synchronized move
RELATED COMMANDS:
ADTS=formula Acceleration/Deceleration Target, Synchronized (see page 259)
GS Start Synchronized Motion (GO Synchronized) (see page 467)
PRTSS(...) Position, Relative Target, Synchronized, Supplemental (see page 656)
Part 2: Commands: PTS(...)