Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 690 of 909
SAMP
Sampling Rate
APPLICATION: System
DESCRIPTION: Gets (reads) the sample rate in Hertz (Hz)
EXECUTION: Immediate
CONDITIONAL TO: N/A
LIMITATIONS: N/A
READ/REPORT: RSAMP
WRITE: Read only
LANGUAGE ACCESS: Formulas and conditional testing
UNITS: Hz
RANGE OF VALUES: 2000 to 16000
TYPICAL VALUES: 2000 to 16000
DEFAULT VALUE: 8000
FIRMWARE VERSION: 5.x and later
COMBITRONIC: RSAMP:3, x=SAMP:3
where ":3" is the motor address — use the actual address or a
variable
DETAILED DESCRIPTION:
The SAMPcommand is used to get (read) the sample rate in Hertz (Hz). You can issue SAMP
to read sample rate at any time. This represents the update rate of the motion trajectory and
PID loop. Therefore, knowing this rate can aid the choice of PID tuning parameters, or
acceleration and velocity values.
This command is the preferred method for obtaining the sample rate. It is simple to include it
in user programs.
NOTE: Instead of placing a hard-coded value in the program, any program that
requires the sample rate should use this command.
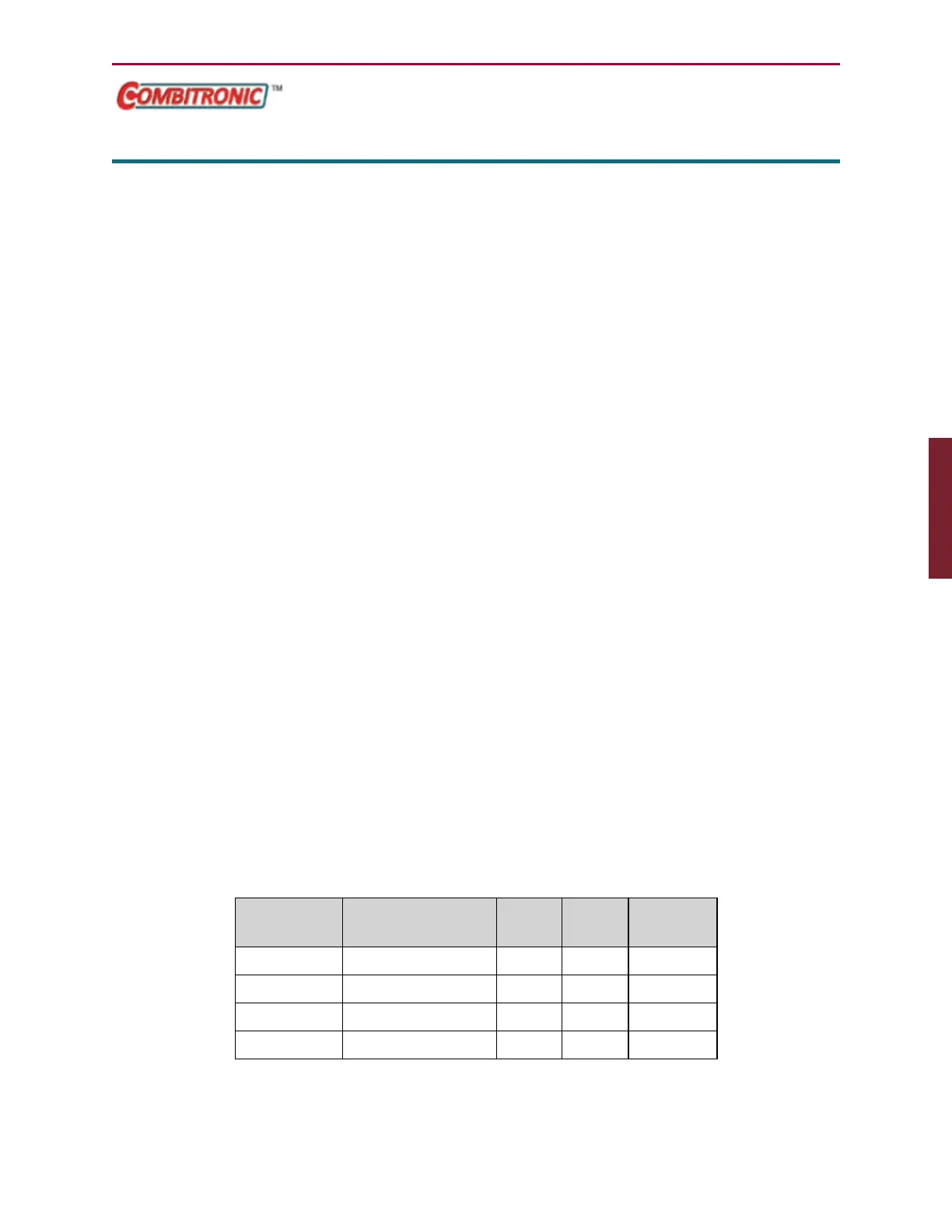
The following table shows the possible SAMPreport values.
Command
PID / Trajectory
Update Rate
Period
(µsec)
SAMP
Report
RSP
Report
PID1 16 kHz 62.5 16000 06250/5...
PID2 8 kHz (default) 125 8000 12500/5...
PID4 4 kHz 250 4000 25000/5...
PID8 2 kHz 500 2000 50000/5...
Part 2: Commands: SAMP