Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 772 of 909
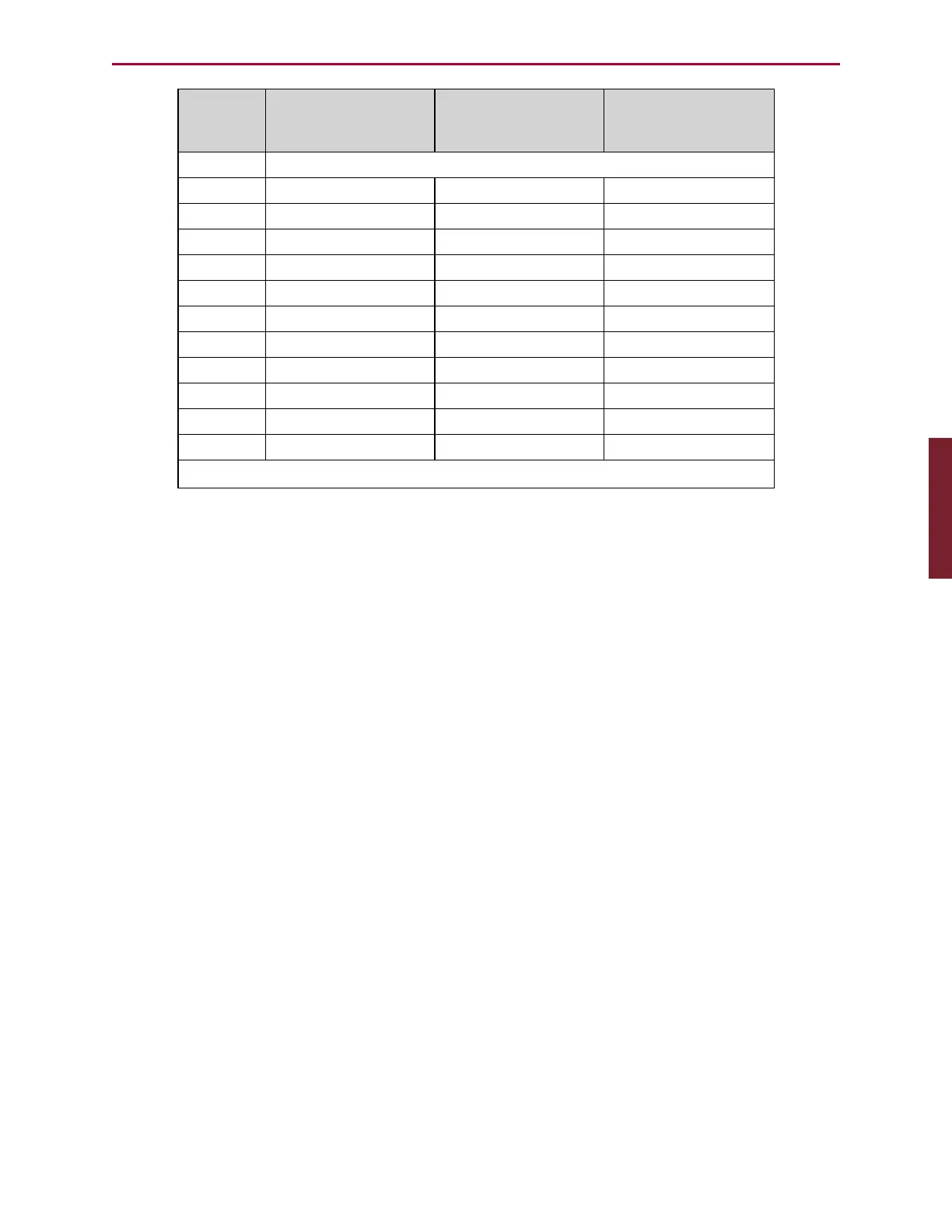
Value
of VAC
Time
Constant
(PID samples)
Time
Constant
(msec)*
Cutoff
Frequency
-3 dB (Hz)*
0 Filter disabled (raw values immediately update VA)
50000 3.70 0.462 345
60000 11.3 1.42 112
65000 122 15.2 10.5
65400 481 60.2 2.65
65450 762 95.2 1.67
65500 1820 227 0.700
65510 2520 315 0.505
65520 4095 512 0.311
65525 5957 745 0.214
65530 10922 1365 0.117
65535 65536 8192 0.019
*Affected by PID rate
Notes for previous table:
1. Time Constant is the time required for a step response to reach 63.2% of the final
settled value.
2. Cutoff Frequency is the frequency that is attenuated to -3 dB (70.7% the original value).
Higher frequencies will be further reduced; lower frequencies will remain stronger than
70.7%.
3. Time Constant (msec) and the Cutoff Frequency (Hz) are affected by the PID rate set-
ting. The table assumes 8000 Hz for the Class 5 motor.
4. Time Constant (PID samples) is not affected by the PID rate setting.
The "Time Constant (PID samples)" should not be construed as the number of averaged
samples — it is the number of samples required for an abrupt change (step function) to reach
70.7% of the final value. For instance, refer to the second figure where a step function is
approximated by setting a large value for acceleration. The fourth bump has a time constant
of 10922 samples. However, it is the same physical move as the others. This means that it
takes over one second for the reading to catch up to 70.7% of the actual speed of the motor.
Further, consider this example: the motor used for the following figures has actual cogging;
the default setting of VAC(65000) depicts the actual speed fluctuations.
l
VAC(0) is dominated by quantization effects, which make the readings jump around by
exactly 65536.
l
VAC(65400) gives a highly averaged reading in this case. This can be useful in cases
where you need a stable reading and are willing to wait long enough for the speed to
settle. Referring to the previous table, this rolls off frequencies above 2.65 Hz. A good
rule of thumb is to wait five time-constants for a value to settle. In this case, the time
constant is 60 msec. Therefore, you would wait for 300 msec (60 x 5 = 300) to allow the
value to settle to a valid reading.
Part 2: Commands: VAC(arg)