Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 773 of 909
To do this in a program:
1.
Issue a G command.
2.
Wait for the slew status bit to indicate the slew portion of a move.
3.
Wait 300 msec for the speed to settle (to obtain a valid reading)
4.
Read VA (with RVA or x=VA).
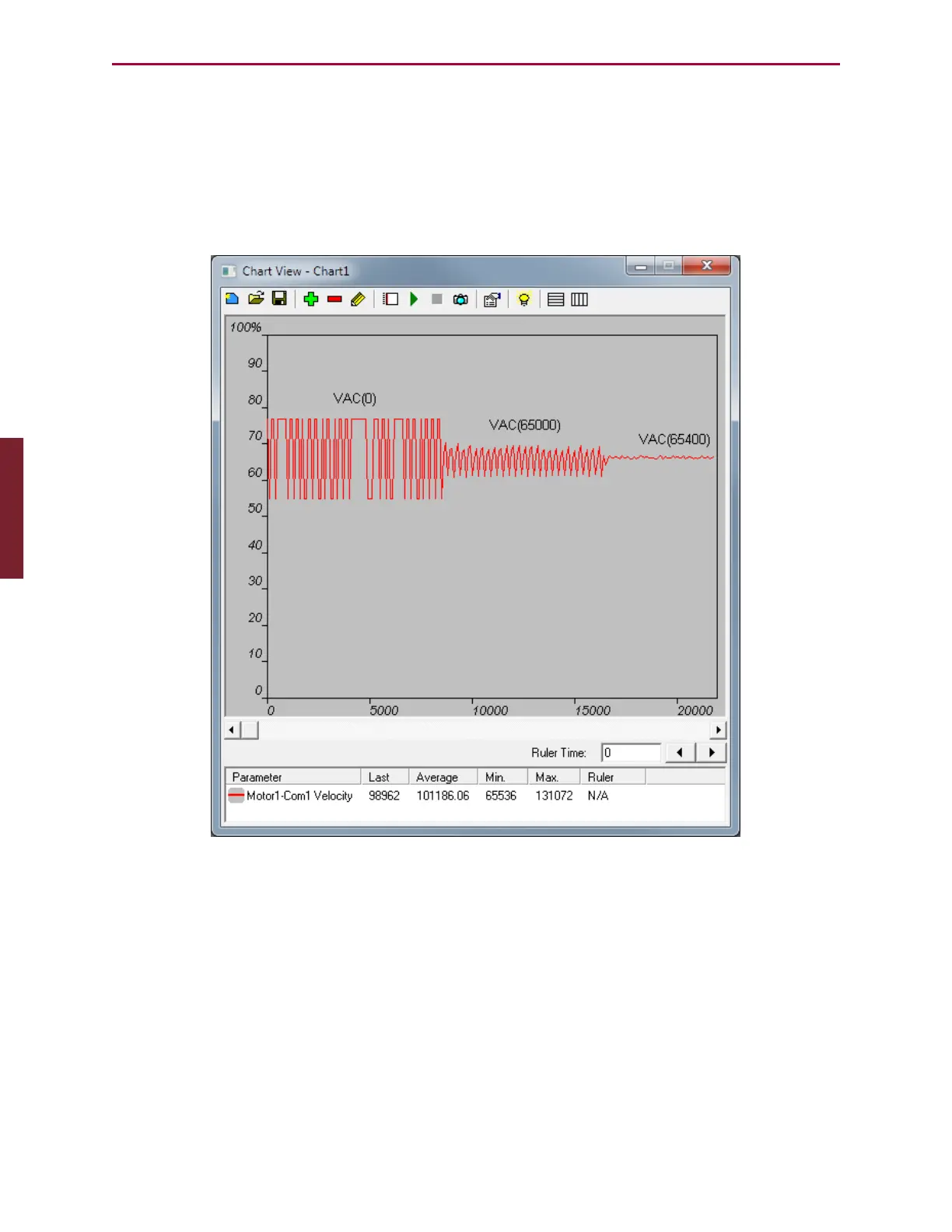
Examples of RVA readings with different settings of VAC()
Part 2: Commands: VAC(arg)