Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 877 of 909
Scale Factor Calculation
This section provides information on using Sample Rates and Encoder Resolution to calculate
scale factors.
Sample Rates
NOTE: For Class 6 SmartMotors, the sample rate is fixed at 16,000 Hz (16 kHz).
Native units for all SmartMotors are in Encoder Counts per sample. A "sample" is considered
the time period during which encoder position data is collected. The following are related
commands:
l
SAMP is a read-only command that returns the value of the sample rate in cycles per
second and is affected by the PID command. For example:
x=SAMP 'Set x equal to the sample rate
NOTE: There is no SAMP= command.
l
RSAMP reports the sample rate in values of samples per second to the SMIterminal
window or other user interface. For example:
RSAMP 'Report the sample rate to the user's screen.
For example, if you issues RSAMP and it returns 8000, then the motor collects position
samples 8000 times per second. The default sample rate is 8000 samples per second, but it
can be adjusted, as described in the next section.
PID Sample Rate Command
NOTE: This feature is not available for Class 6 SmartMotors.
The SmartMotor controllers default to 8000 samples per second, but it is adjustable by use of
the PID command. The command PID2 is the default. However, the commands PID1, PID4,
and PID8 are also available.
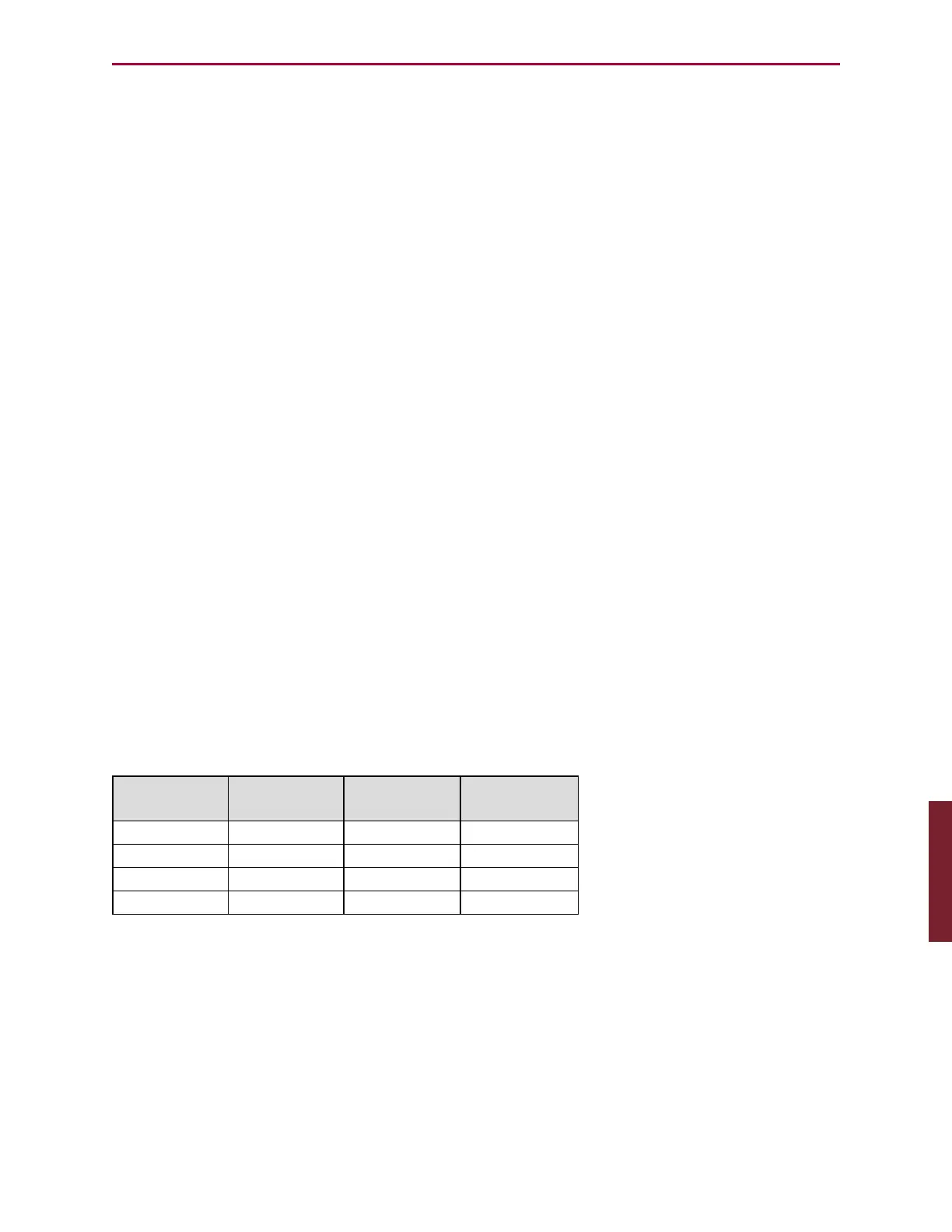
The following is a list of sample rates for each of the PID commands:
PID
Command
Samples
per Second
Value
SAMP
RSAMP
Returns:
PID8 2000 2000 2000
PID4 4000 4000 4000
PID2 8000 8000 8000
PID1 16000 16000 16000
Encoder Resolution and the RES Parameter
The following commands are used to report encoder resolution:
l
RES is a read-only command that reports the encoder resolution that will be
experienced by the user (i.e., the change in RPA as the motor makes one shaft
revolution). The values stored in the EEPROM fields for encoder resolution may not be a
reliable source of information due to pre-scaling in the encoder firmware. For example:
x=RES 'Set x equal to the encoder resolution.
Appendix: Scale Factor Calculation