12
n
Precautions
Before
Using
Autotuning
Read
the
following
precautions
before
using
autotuning.
• Autotuning
the
Inverter
is
fundamentally
different
from
autotuning
the
servo
system.
Inverter
autotuning
automatically
adjusts
parameters
according
to
detected
motor
constants,
whereas
servo
system
autotuning
adjusts
parameters
according
to
the
detected
size
of
the
load.
• When
speed
precision
is
required
at
high
speeds
(i.e.,
90%
of
the
rated
speed
or
higher),
use
a
motor
with
a
rated
voltage
that
is
20
V
less
than
the
input
power
supply
voltage
of
the
Inverter
for
200V-class
Inverters
and
40
V
less
for
400V-class
Inverters.
If
the
rated
voltage
of
the
motor
is
the
same
as
the
input
power
sup-
ply
voltage,
the
voltage
output
from
the
Inverter
will
be
unstable
at
high
speeds
and
sufficient
performance
will
not
be
possible.
• Use
stationary
autotuning
whenever
performing
autotuning
for
a
motor
that
is
connected
to
a
load.
• Use
rotational
autotuning
whenever
performing
autotuning
for
a
motor
that
has
fixed
output
characteristics
or
for
a
motor
that
is
not
connected
to
a
load.
• If
rotational
autotuning
is
performed
for
a
motor
connected
to
a
load,
the
motor
constants
will
not
be
found
accurately
and
the
motor
may
exhibit
abnormal
operation.
Never
perform
rotational
autotuning
for
a
motor
connected
to
a
load.
• If
the
wiring
between
the
Inverter
and
motor
changes
by
50
m
or
more
between
auto
tuning
and
motor
installation,
perform
stationary
autotuning
for
line-to-line
resistance
only.
• If
the
motor
cable
is
long
(50
m
or
longer),
perform
stationary
autotuning
for
line-to-line
resistance
only
even
when
using
V/f
control.
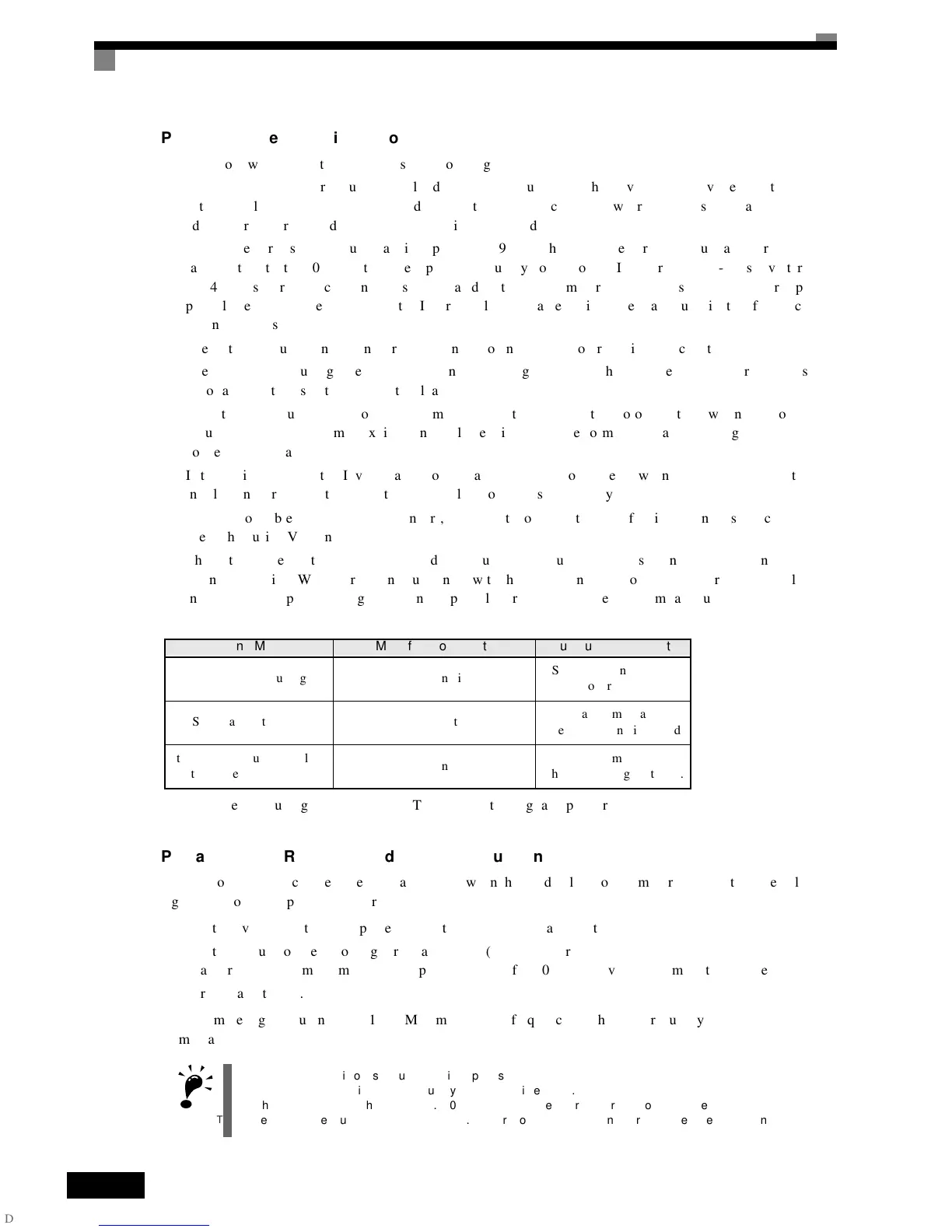
• The
status
of
the
multi-function
inputs
and
multi-function
outputs
will
be
as
shown
in
the
following
table
during
autotuning.
When
performing
autotuning
with
the
motor
connected
to
a
load,
be
sure
that
the
hold-
ing
brake
is
not
applied
during
autotuning,
especially
for
conveyor
systems
or
similar
equipment.
• To
cancel
autotuning,
always
use
the
STOP
Key
on
the
Digital
Operator.
n
Precautions
for
Rotational
and
Stationary
Autotuning
Use
the
following
procedure
to
perform
autotuning
when
the
rated
voltage
of
the
motor
is
higher
than
the
volt-
age
of
the
power
supply
to
the
Inverter.
1. Input
the
voltage
of
the
input
power
supply
to
T1-03
(Motor
rated
voltage).
2. Input
the
results
of
the
following
formula
to
T1-05
(Motor
base
frequency):
(Base
frequency
from
the
motor’s
nameplate
×
setting
of
T1-03)/(Rated
voltage
from
motor’s
nameplate)
3. Perform
autotuning.
After
completing
autotuning,
set
E1-04
(Maximum
output
frequency)
to
the
base
frequency
from
the
motor’s
nameplate.
Tuning Mode Multi-function Inputs Multi-function Outputs
Rotational
autotuning Do
not
function.
Same
as
during
normal
operation
Stationary
autotuning Do
not
function.
Maintain
same
status
as
when
autotuning
is
started.
Stationary
autotuning
for
line-
to-line
resistance
only
Do
not
function.
Maintain
same
status
as
when
autotuning
is
started.
IMPORTANT
1. When speed precision is required at high speeds (i.e., 90% of the rated speed or higher), set T1-03 (Motor
rated voltage) to the input power supply voltage multipled by 0.9.
2. When operating at high speeds (i.e., 90% of the rated speed or higher), the output current will increase as
the input power supply voltage is reduced. Be sure to provide sufficient margin in the Inverter current.

 Loading...
Loading...






