6.5.4.2 Interface description (motor side)
Overview
The encoder interface on the motor is used to transfer position data to the converter for real time
control.
Description
• 1FL2 shaft heights 20, 30, and 40
The encoder interface is integrated into the hybrid connector. For more information, see
Section "Interface description - power connector (motor side) (Page136)".
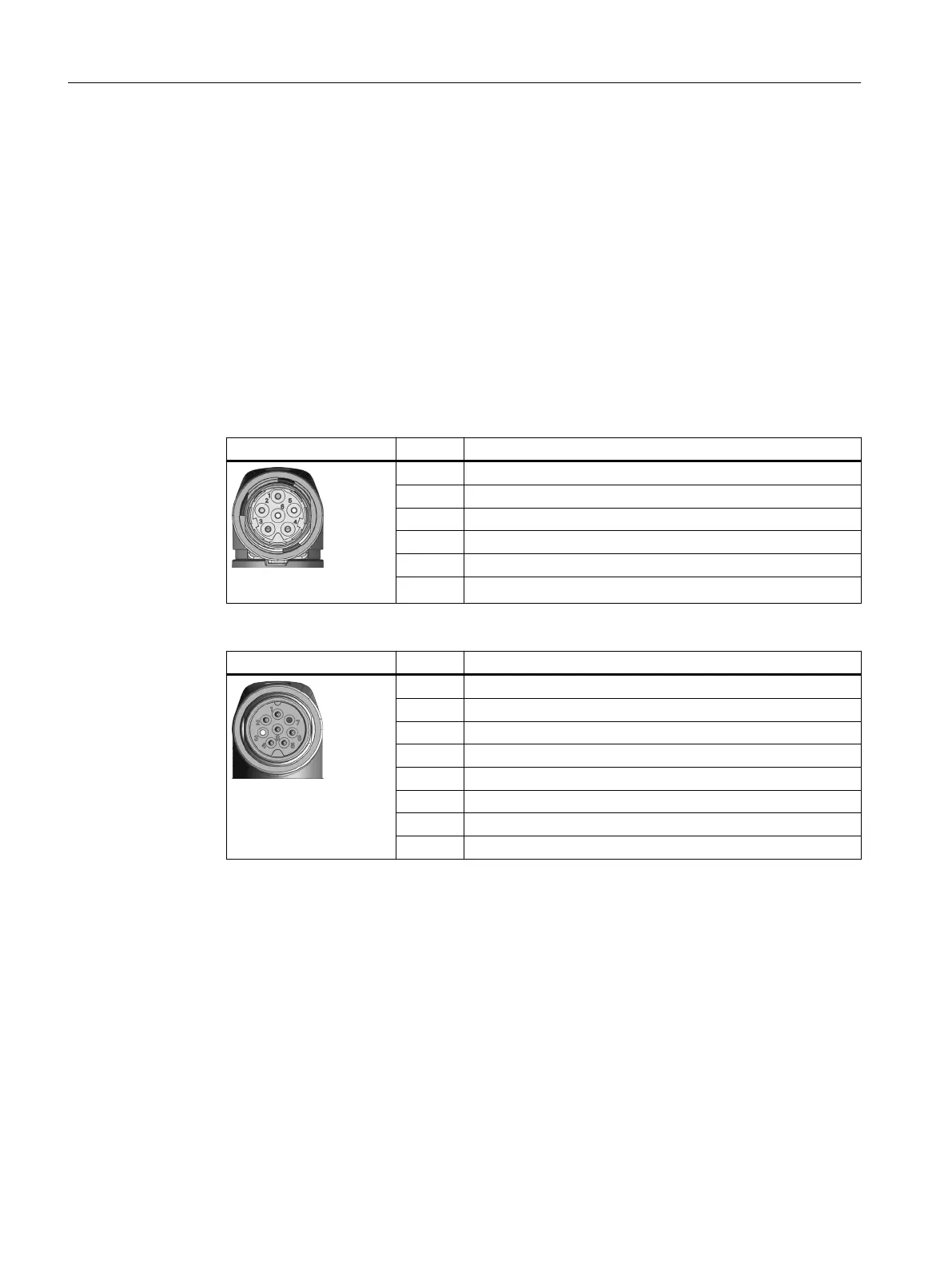
• 1FL2 shaft heights 48 and 52
Encoder interface Pin Designation
M17 angular connector
1 Encoder power supply, 5V
2 Encoder power supply, reference ground
3 Absolute encoder clock signal, positive
4 Absolute encoder clock signal, negative
5 Absolute encoder data signal, positive
6 Absolute encoder data signal, negative
• 1FL2 shaft heights 45, 65, and 90
Encoder interface Pin Designation
M17 angular connector
1 Encoder power supply, 5V
2 Encoder power supply, reference ground
3 Reserved
4 Absolute encoder clock signal, negative
5 Absolute encoder data signal, positive
6 Absolute encoder clock signal, positive
7 Reserved
8 Absolute encoder data signal, negative
Connecting
6.5Connecting the motor
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
144 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB