When telegrams 7, 9, 111, and 112 are used, reject an MDI task with the PROFINET control
word S
TW1.4:
Control word Signal Description
STW1.4 1 Do not reject a traversing task.
0 Reject a traversing task (ramp-down with the maximum deceler‐
ation).
10.6.7 Jog
Overvie
w
It is possible to change over between jog incremental and jog velocity. The traversing distances
p2587 and p2588 and velocities p2585 and p2586 are entered according to the jog signals
c2589 and c2590. The traversing distances are only eective for a "1" signal at p2591 (jog
incremental). For p2591 = "0", the axis moves to the start of the traversing range or to the end
of the traversing range with the specied velocity.
Description of function
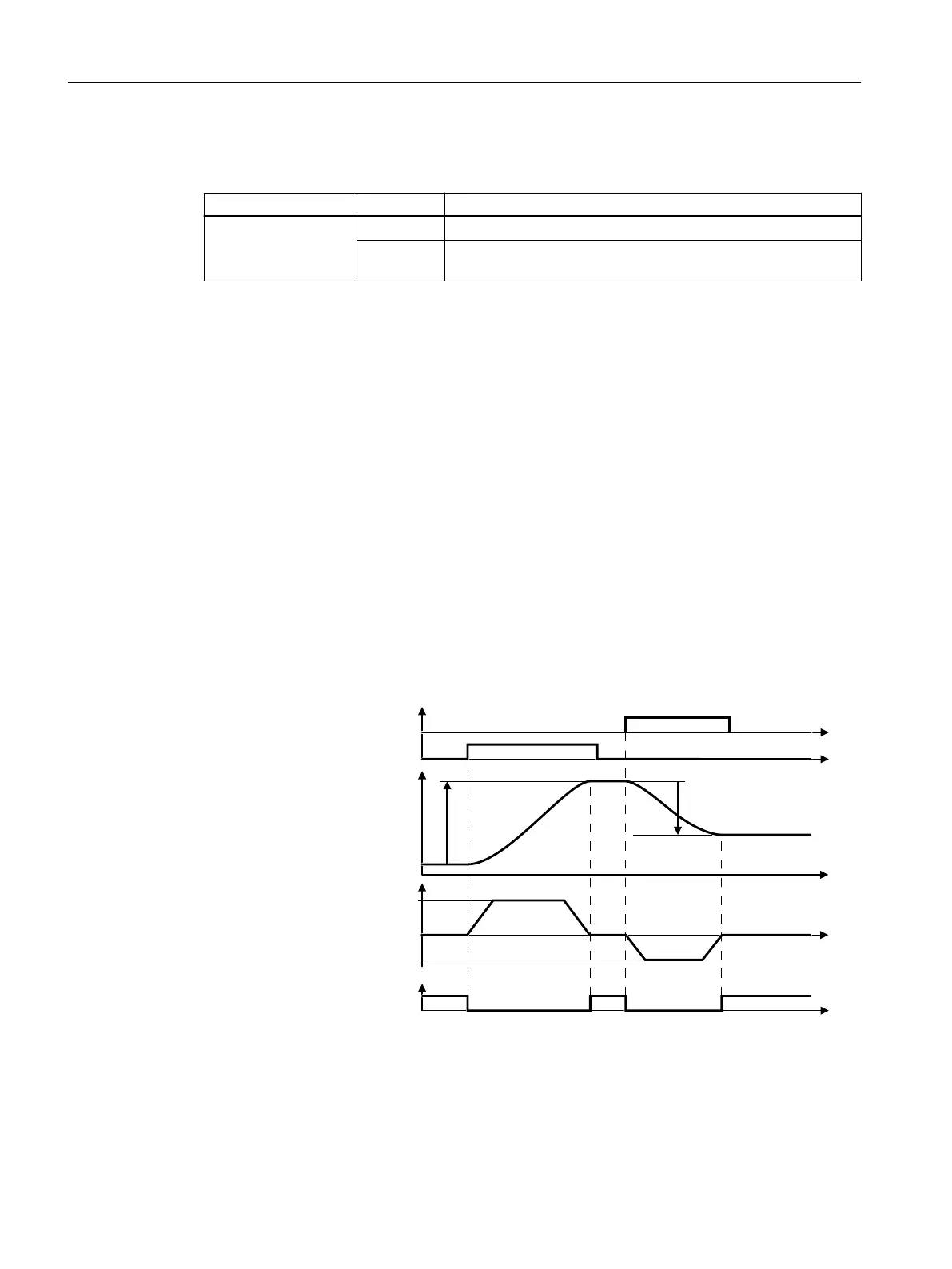
Jog incremental
In the case of incremental jogging, input a relative traversing distance and a velocity setpoint
into the converter. With the signals "Jogging 1" or "Jogging 2" the converter positions the axis
by the respective travel path.
-RJ
-RJ
-RJJLQJ
WUDYHUVLQJ
GLVWDQFH
-RJJLQJWUDYHUVLQJ
GLVWDQFH
-RJJLQJVHWSRLQWYHORFLW\
-RJJLQJVHWSRLQWYHORFLW\
3RVLWLRQVHWSRLQWUHDFKHG
W
V
W
Y
W
W
Figure10-16 Jog incremental
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
394 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB