Description of function
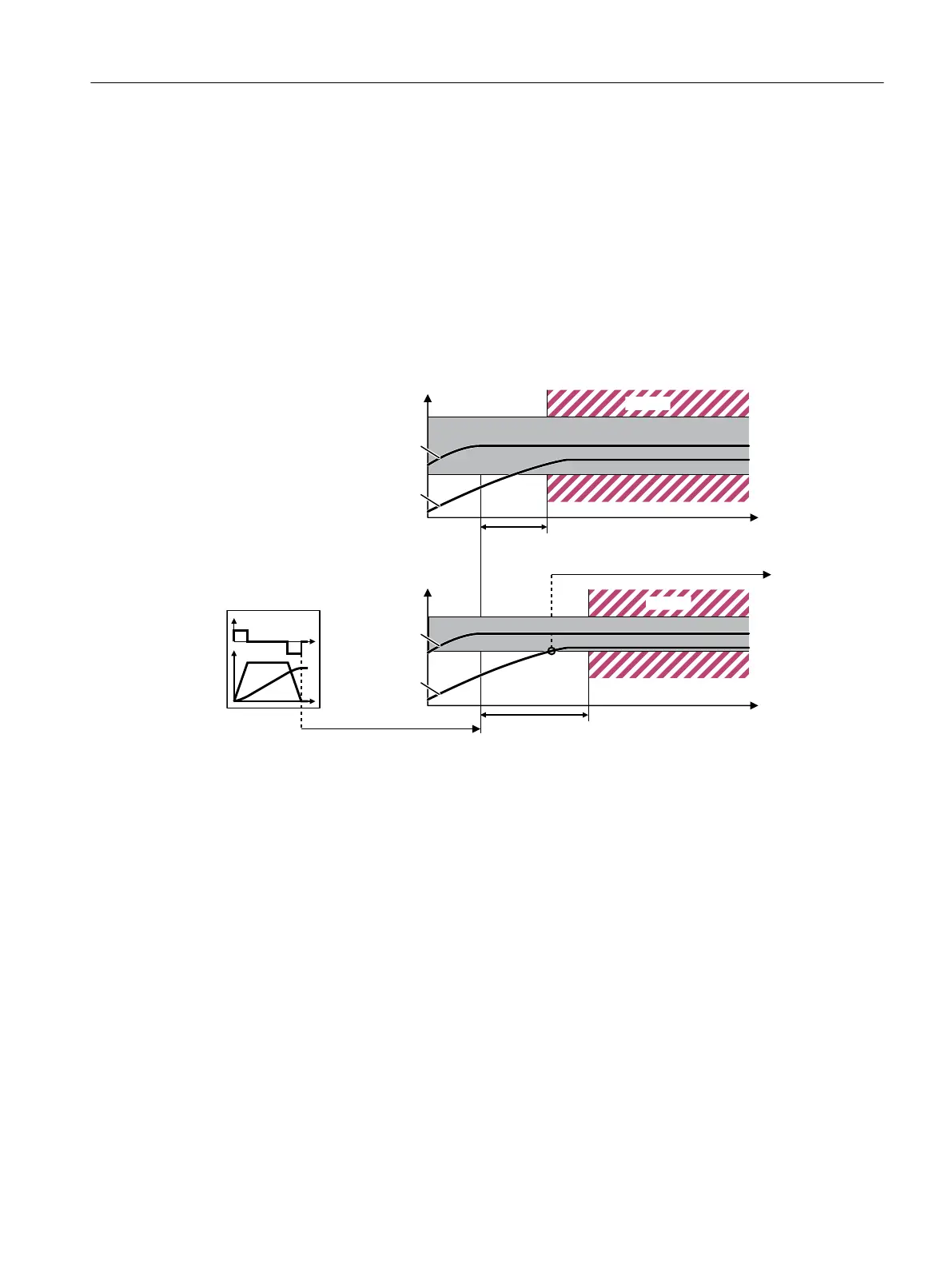
As soon as the setpoint for the position within a positioning operation no longer changes, then
the converter sets the "Setpoint stationary" signal to 1. With this signal, the converter starts to
monitor the position actual value:
• As soon as the axis has reached the positioning window, the converter signals that the target
has been reached, and maintains the axis in closed-loop control.
• If the axis does not come to a standstill within the standstill monitoring time, the converter
reports fault F07450.
• If the axis does not enter the positioning window within the positioning monitoring time, the
converter reports fault F07451.
3RVLWLRQVHWSRLQW
3RVLWLRQDFWXDOYDOXH
3RVLWLRQ
VHWSRLQW
3RVLWLRQDFWXDO
YDOXH
6HWSRLQWVWDWLF
7DUJHWSRVLWLRQ
LVUHDFKHG
6WDQGVWLOOZLQGRZ
6WDQGVWLOOPRQLWRULQJWLPH
3RVLWLRQLQJZLQGRZ
3RVLWLRQLQJPRQLWRULQJWLPH
V
V
W
)
)
Y
V
D
W
Figure10-9 Standstill monitoring and positioning monitoring
10.6.3.2 Following error monitoring
Overvie
w
Following error monitoring is used to monitor the maximum deviation between the actual value
and the position setpoint.
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 375