10.6 Basic positioner (EPOS)
Overvie
w
Position control means controlling the position of an axis. An "axis" is a machine or system
component that comprises the converter with active position control and the driven mechanical
system.
The basic positioner (EPOS) is a positioner integrated in the converter and calculates the
traversing prole for the time-optimized traversing of the axis to the target position for the
position controller. With the basic positioner (EPOS), the positioning tasks can be transferred
to the converter and thus relieve the higher-level control system.
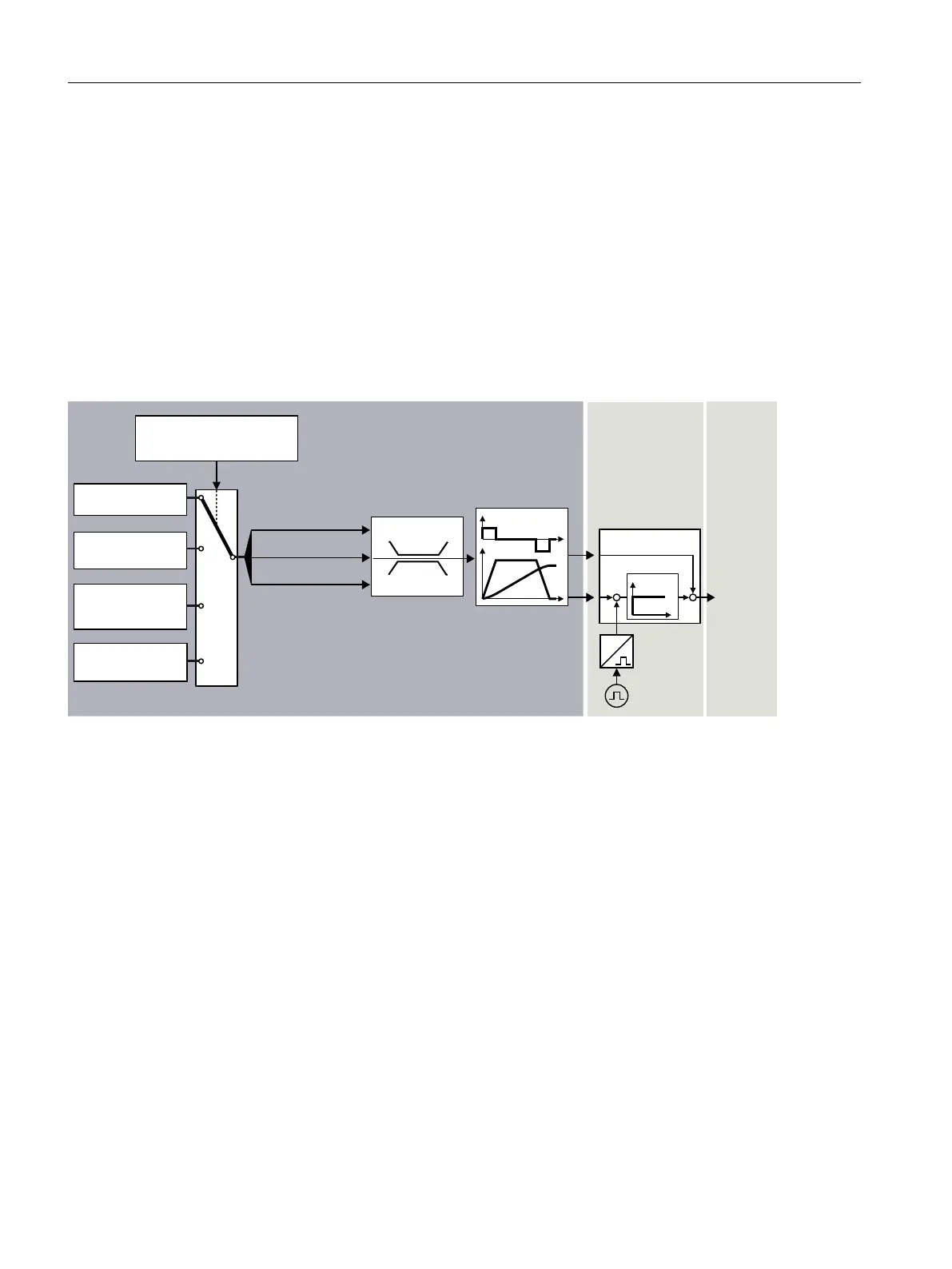
&RQWURODQGVHOHFWLRQRI
WKHRSHUDWLQJPRGH
%DVLFSRVLWLRQHU(326
3RVLWLRQFRQWUROOHU
3RVLWLRQ
9H
ORFLW\
$FFHOHUDWLRQ
*HQHUDWH
WUDYHUVLQJSURILOH
(QFRGHU
6SHHG
FRQWUROOHU
'LUHFWO\HQWHU
VHWSRLQW
-RJJLQJ
+RPLQJ
7UDYHUVLQJEORFNV
/L
PLWWUDYHUVLQJ
SURILOH
/8
V
D
Y
V
Y
Y
V
D
.
3
Figure10-6 Basic positioner and position control
Description of function
The following functions can be carried out by using the basic positioner:
• Limits
– Limiting the traversing range: specication of the possible traversing range through the
conguration of various end positions
– Limiting the traversing proles: restriction of the dynamic travel response through
limitation of the maximum velocity, acceleration, deceleration, and jerk
• Monitoring
– Position/standstill monitoring: monitoring of the axis positioning motion and monitoring
of the axis position after a traversing motion
– Following error monitoring: monitoring of the maximum deviation between the actual
value and the setpoint
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
368 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB