Description of function
• Physical units (default setting)
The converter provides the physical units for position, speed, acceleration/deceleration, and
jerk. You can select the desired physical units according to the actual axis type via relevant
parameters during commissioning.
Axis type Available physical units
Position Velocity
Linear axis km, m, mm, μm, nm, in, ft, mi km/h, km/min, m/h, m/min, m/s, mm/h,
mm/min,
mm/s, in/min, in/s, ft/min, ft/s,
mi/h
Rotary axis degree (°) degree (°)/s
Note:
Units in bold are t
he default units.
The acceleration is set accordingly as the position/s² measurement unit.
The jerk is set accordingly as the position/s³ measurement unit.
Note
When using t
he ph
y
sical unit for positioning operation, POS_STW2.0 must be set to 1.
Otherwise, fault F07452 occurs.
• Length unit
The con
verter calculates the position actual value of the axis using the neutral position unit
LU (Length Unit). The length unit LU is independent of whether the converter controls the
position of an elevating platform or the angle of rotary table.
Note
If you chang
e the axis type from linear axis to rotary axis or vice versa, the units will be set to
default units automatically.
The settings you made will not be converted when changing the units.
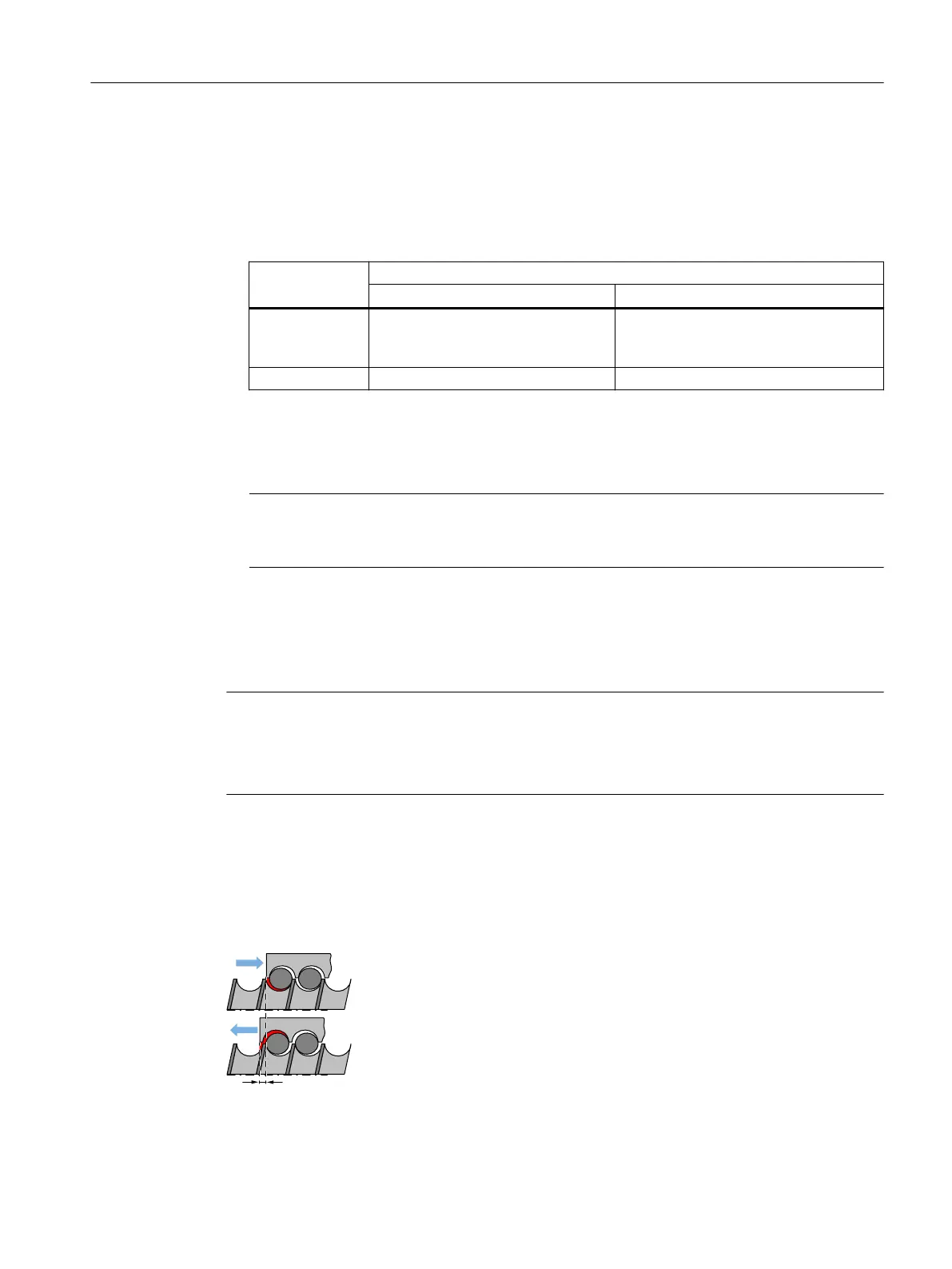
10.6.1.3 Setting the backlash
Overvie
w
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 371