Backlash (also called play, dead travel on reversing) is the distance or the angle that a motor
must tra
vel through when the direction of rotation reverses until the axis actually moves in
the other direction.
Description of function
Backlash measurement
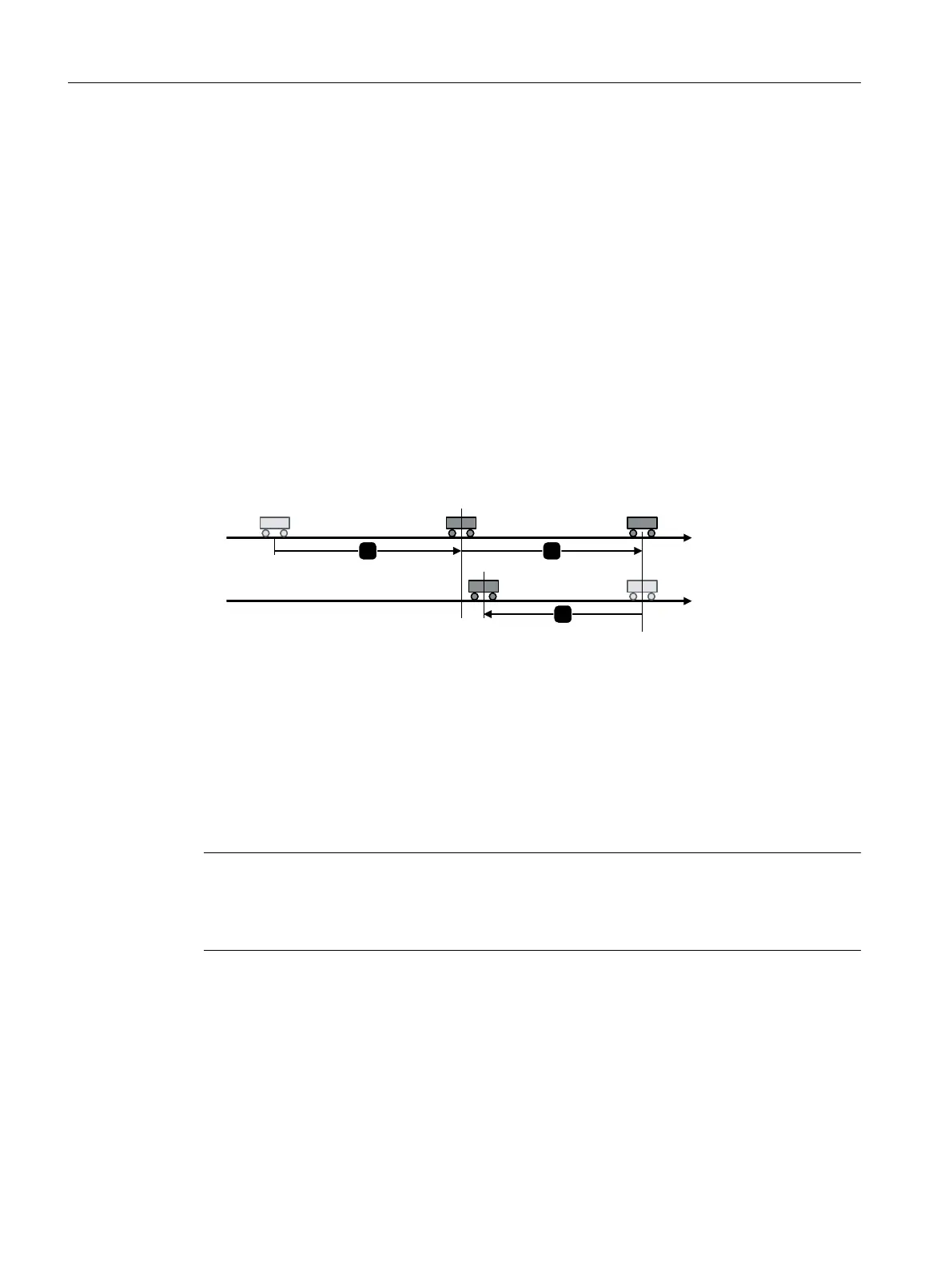
Proceed as follows to measure the backlash:
1. Move the axis to position A in the machine. Mark this position in the machine and note down
the actual position value in the converter.
2. Move the axis a little bit more in the same direction.
3. Move the axis in the opposite direction until the actual position value in the converter shows
the same value as at position A. Due to the backlash when reversing, the axis is now at
position B.
4. Measure the position dierence Δ = A ‑ B in the machine.
Figure10-7 Measuring backlash
Backlash compensation
When mechanical for
ce is transferred between a machine part and its drive, generally
backlash occurs. If the mechanical system was to be adjusted/designed so that there was
absolutely no backlash, this would result in high wear. Thus, backlash can occur between
the machine component and the encoder. For axes with indirect position sensing, when the
axis is operated in a process that the traversing direction is reversed, the mechanical backlash
results in an error of the traversing distance, as the axis travels either too far or not far
enough.
Note
Precondition for bac
klash compensation
The backlash compensation is active with the precondition that the axis has been adjusted for
absolute measuring systems.
In order to compensate the backlash, the determined backlash must be specied in p2583
with the cor
rect polarity. At each direction of rotation reversal, the actual axis value is
corrected dependent on the actual traversing direction and displayed in r2667. This value is
taken into account in the actual position value using p2516 (position oset).
If a stationary axis is homed by setting the home position or an adjusted axis is powered-up
with an absolute encoder, then the parameter c2604 (home position approach, starting
direction) is relevant for switching-in the compensation value.
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
372 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB