10.4.3.6 Telegram 105
Overview
The telegram is suitable for the closed-loop speed control and closed-loop position control of a
drive and to control 1 position encoder.
Requirement
PROFINET with IRT (Isochronous Real-Time)
Description of function
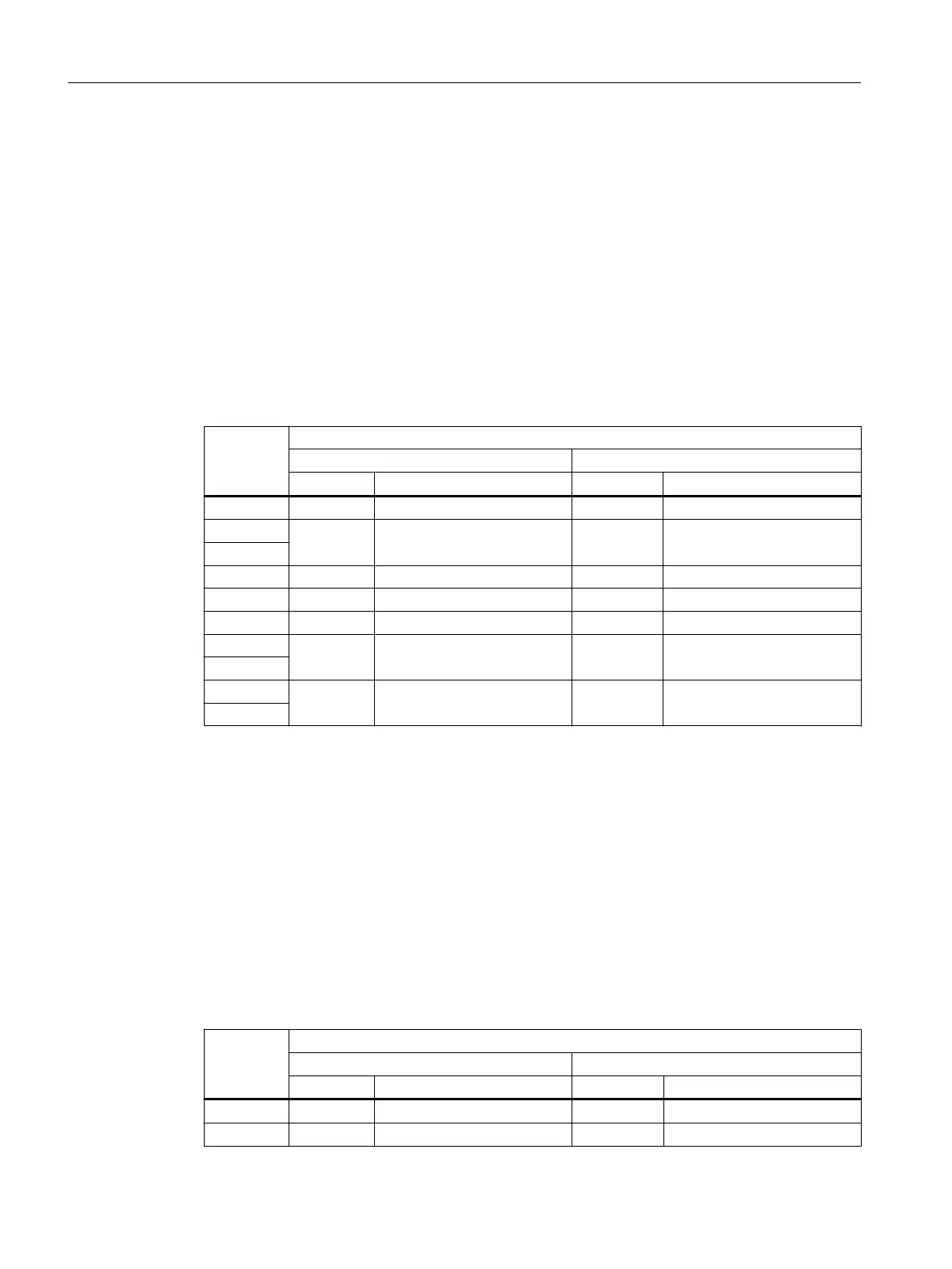
Process da‐
ta
Teleg
ram 105
Control → Converter Converter → Control
Signal Explanation Signal Explanation
PZD01 STW1 Control word1 ZSW1 Status word1
PZD02 NSOLL_B 32-bit speed setpoint NIST_B Speed actual value 32-bit
PZD03
PZD04 STW2 Control word2 ZSW2 Status word2
PZD05 MOMRED Torque reduction MELDW Message word
PZD06 G1_STW Control word for encoder 1 G1_ZSW Status word for encoder 1
PZD07 XERR Position controller deviation G1_XIST1 Position actual value 1 from
encoder 1
PZD08
PZD09 KPC Gain factor for the position
contr
oller
G1_XIST2
Position actual value 2 from
encoder 1
PZD10
10.4.4 Telegrams for position control
10.4.4.1 Teleg
ram 7
Overview
The telegram is suitable for closed-loop position control of a drive.
Description of function
Process da‐
ta
Teleg
ram7
Control → Converter Converter → Control
Signal Explanation Signal Explanation
PZD01 STW1 Control word1 ZSW1 Status word1
PZD02 SATZANW Position block selection AKTSATZ Selected position block
Functions
10.4Communication telegrams
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
338 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB