4. Optional (for ① and ③):
For home
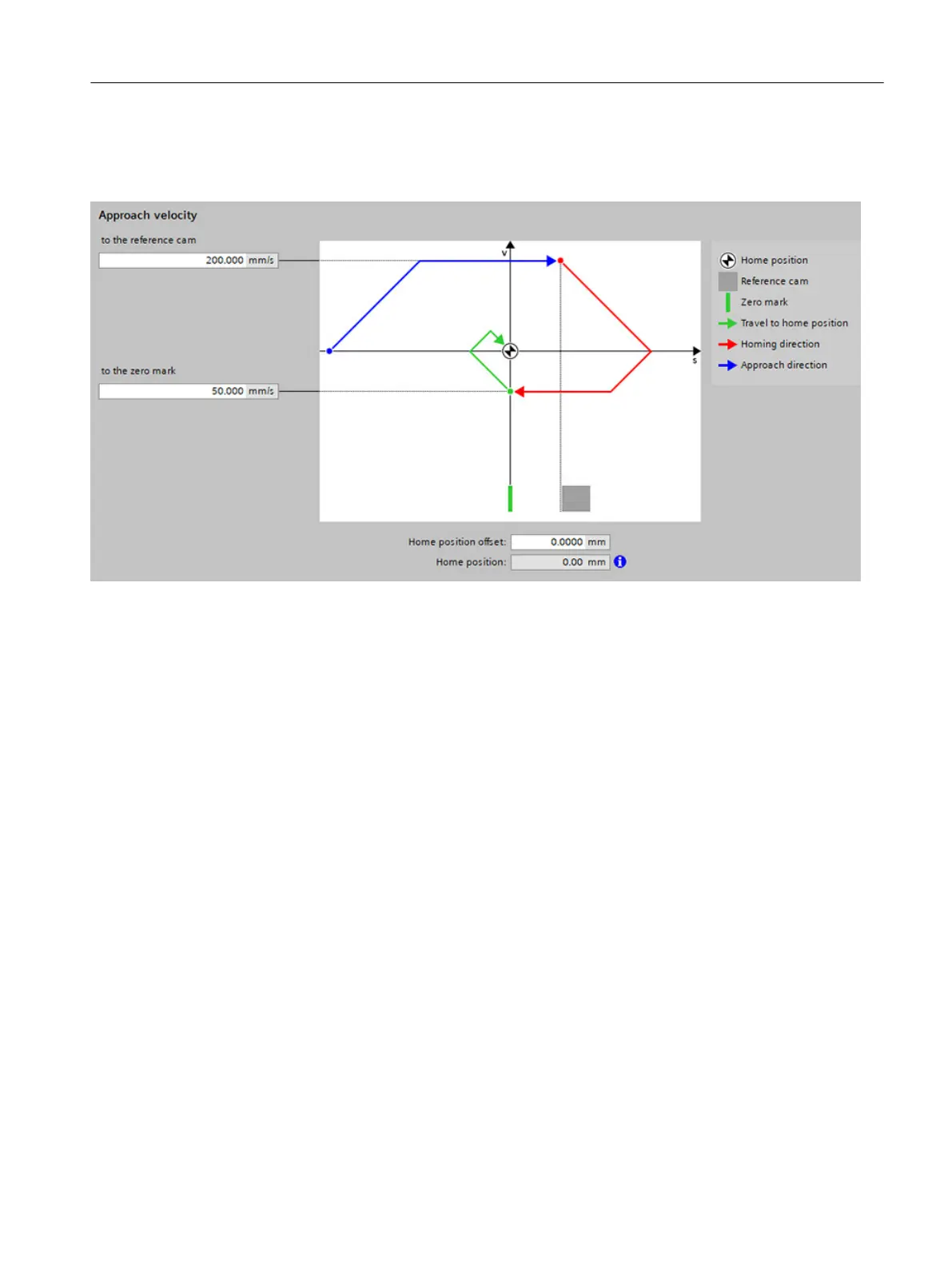
position approach, enter the approach velocity to the reference cam in eld "to the
reference cam".
Figure8-10 Example: conguring approac
h velocity in mode ①
5. Enter an approach velocity in eld "to the zer
o mark".
For home position approach, this approach velocity is applicable after detecting the
reference cam to search for the zero mark.
6. Optional (for ③):
From drop-down list "Digital input of the external zero mark" (p0494) select the input
terminal to connect a zero mark replacement.
This parameter supplies incorrect measured values during an active measurement. In this
particular case, it is not permissible to write to the parameter.
7. Enter the required home position oset for the home position approach in eld "Home
position oset".
8. Enter the position value of the home position coordinate in eld "Home position".
9. Click on "Next" if you do not wish to make any additional EPOS settings.
The quick setup step "I/O conguration" is displayed.
Result
Drive conguration continues based on the selected positioning settings.
Commissioning (Startdrive)
8.6Carrying out guided quick startup
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 267