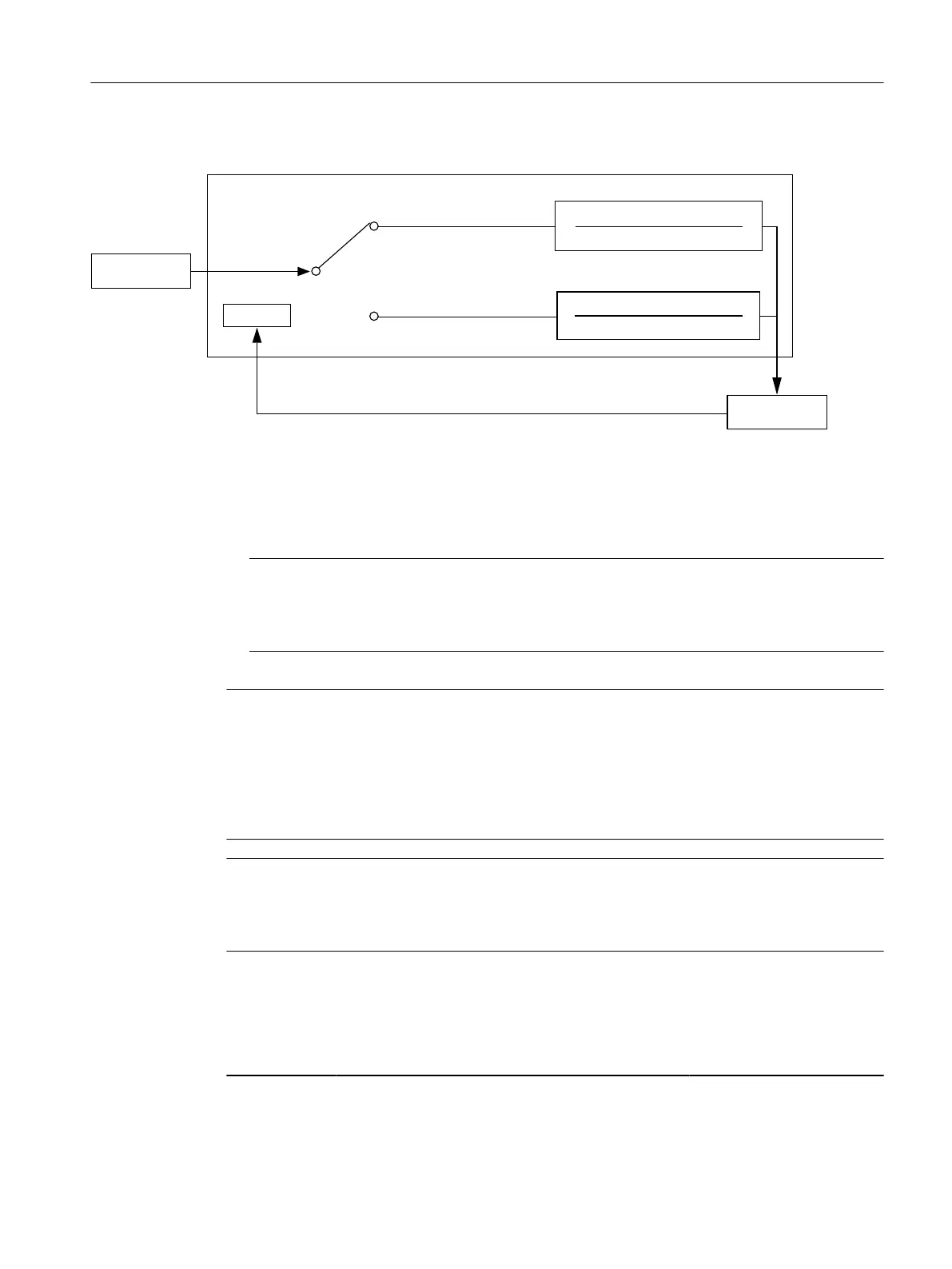
Electronic gear ratio
1XPEHURI372SXOVHVSHUPRWRUUHYROXWLRQ
S
1XPEHURI372SXOVHVSHUPRWRUUHYROXWLRQ
S
&RQWUROOHU
(QFRGHU
1XPHUDWRUS
'HQRPLQDWRUS
(OHFWURQLFJHDUUDWLR
(QFRGHUUHVROXWLRQ
S
37,
The electronic gear ratio is a multiplier factor to the pulse train output to a controller.
You can select one of the f
ollowing two values to dene the electronic gear ratio:
• Number of PTO pulses per motor revolution (p4408).
• Gear ratio by using a numerator (p4410) and a denominator (p4409).
Note
When you use the numer
ator and the denominator to dene the electronic gear ratio, the
number of PTO pulses per motor revolution (p4408) must be set to 0. Otherwise, no
electronic gear ratio is active.
Note
When you use the PTO electronic gear function, the electronic gear is based on the encoder
resolution. The encoder resolution can be read from parameter r0979[2] and the default value
is 1024 ppr.
The range of electronic gear ratio is from 0.02 to 8000.
The electronic gear ratio can be set at servo-o state only.
Note
When you use the PT
O electronic gear function, if the product of the PTO setpoint pulses per
motor revolution multiplied by the electronic gear ratio is not an integer, there is no zero mark
generated.
Parameters
The following lis
t includes the parameters of the "PTO" function.
Number Name Unit
p4405 PTO maximum output frequency [kHz]
p4408 PTO pulse number
Functions
10.5General functions
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 363