Functions
2.14 Differential Protection and Its Protected Objects
SIPROTEC, 7UM62, Manual
C53000-G1176-C149-7, Release date 03.2010
106
Add-On Stabilization During Current Transformer Saturation
During an external fault which produces a high through-flowing short-circuit current causing current transformer
saturation, a considerable differential current can be simulated, especially when the degree of saturation is dif-
ferent at the two measuring points. If the quantities I
diff
/I
stab
result in an operating point which lies in the trip area
of the operating characteristic, a trip signal would be the consequence if no special measures were taken.
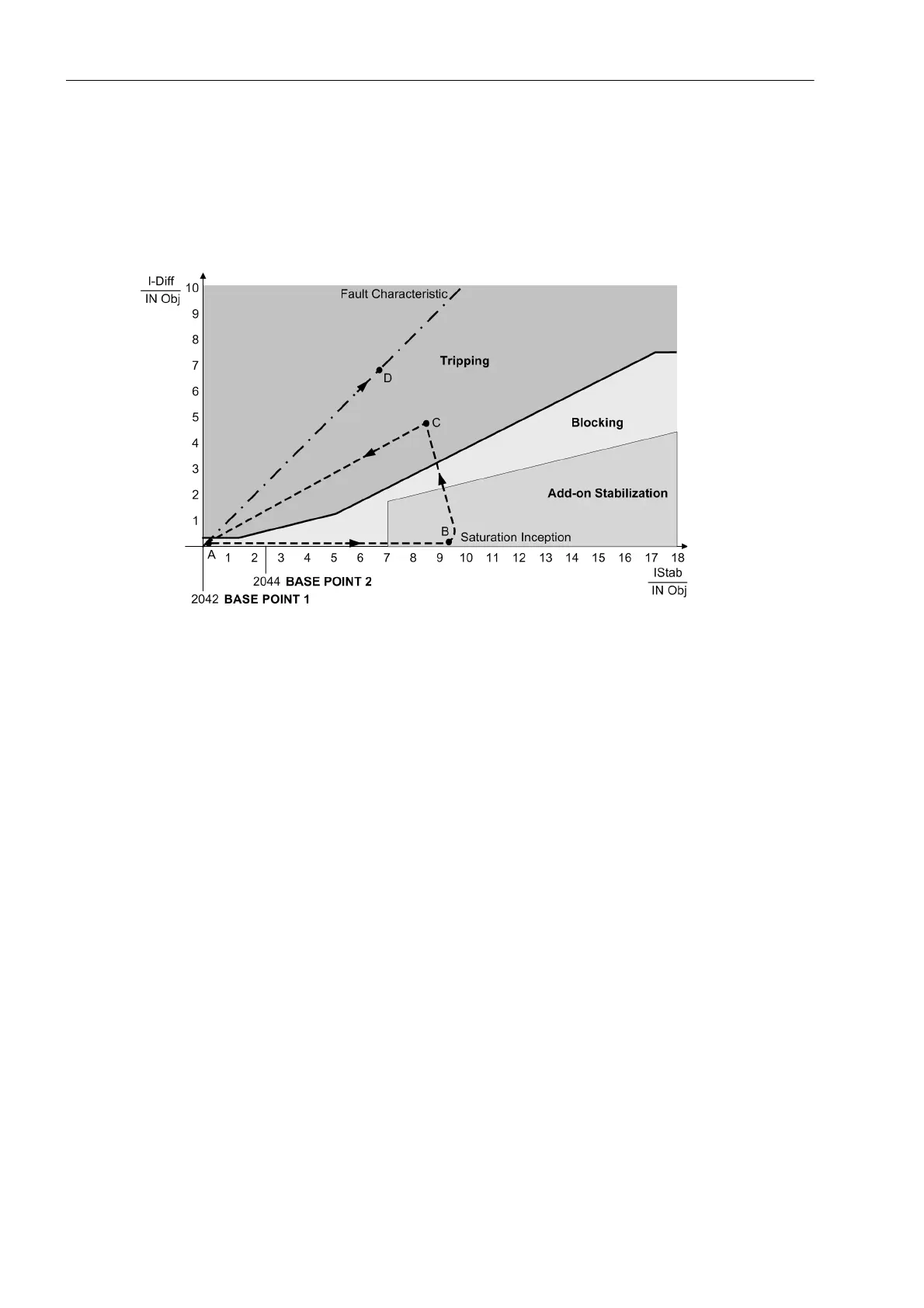
Figure 2-34 Operation Characteristic of the Differential Protection with Fault Characteristic
The 7UM62 provides a saturation indicator which detects such phenomena and initiates add-on stabilization
measures. The saturation indicator evaluates the dynamic behaviour of the differential and stabilizing current.
The dotted line in Figure 2-34 shows the instantaneous development of currents in case of a external fault with
transformer saturation on one side.
Immediately after the fault (A), the short-circuit currents rise strongly, causing a correspondingly high stabilizing
current (2 x through-flowing current). Saturation occurring on one side (B) now causes a differential current and
reduces the stabilizing current, so that the operating point I
diff
/I
stab
may move into the tripping area (C).
In contrast, the operating point moves immediately along the fault characteristic (D) when an internal fault
occurs since the stabilization current will barely be higher than the differential current. Therefore, an internal
fault is assumed as soon as the ratio I
diff
/I
stab
has exceeded an internal threshold for a fixed minimum time.
Current transformer saturation in case of an external fault is thus characterized by a high stabilizing current
flowing at the beginning, i.e. by the operating point (diagram see Figure 2-34) moving into an area that is typical
for a high-current external fault ("add-on stabilization"). The add-on stabilization area is limited by the parame-
ter I-ADD ON STAB. and the first straight line of the characteristic (with BASE POINT 1 and SLOPE 1) (see
following figure). The saturation detector makes its decision within the first quarter of a cycle. When an external
fault is detected, the differential protection is blocked for a selectable time. The blocking is cancelled as soon
as the operating point I
diff
/I
stab
moves steadily (i.e. over 2 cycles) within the tripping area. This allows conse-
quential faults in the protected area to be quickly recognized even after an external fault involving current trans-
former saturation.
 Loading...
Loading...