Library of Function Blocks
4.29
MANUAL
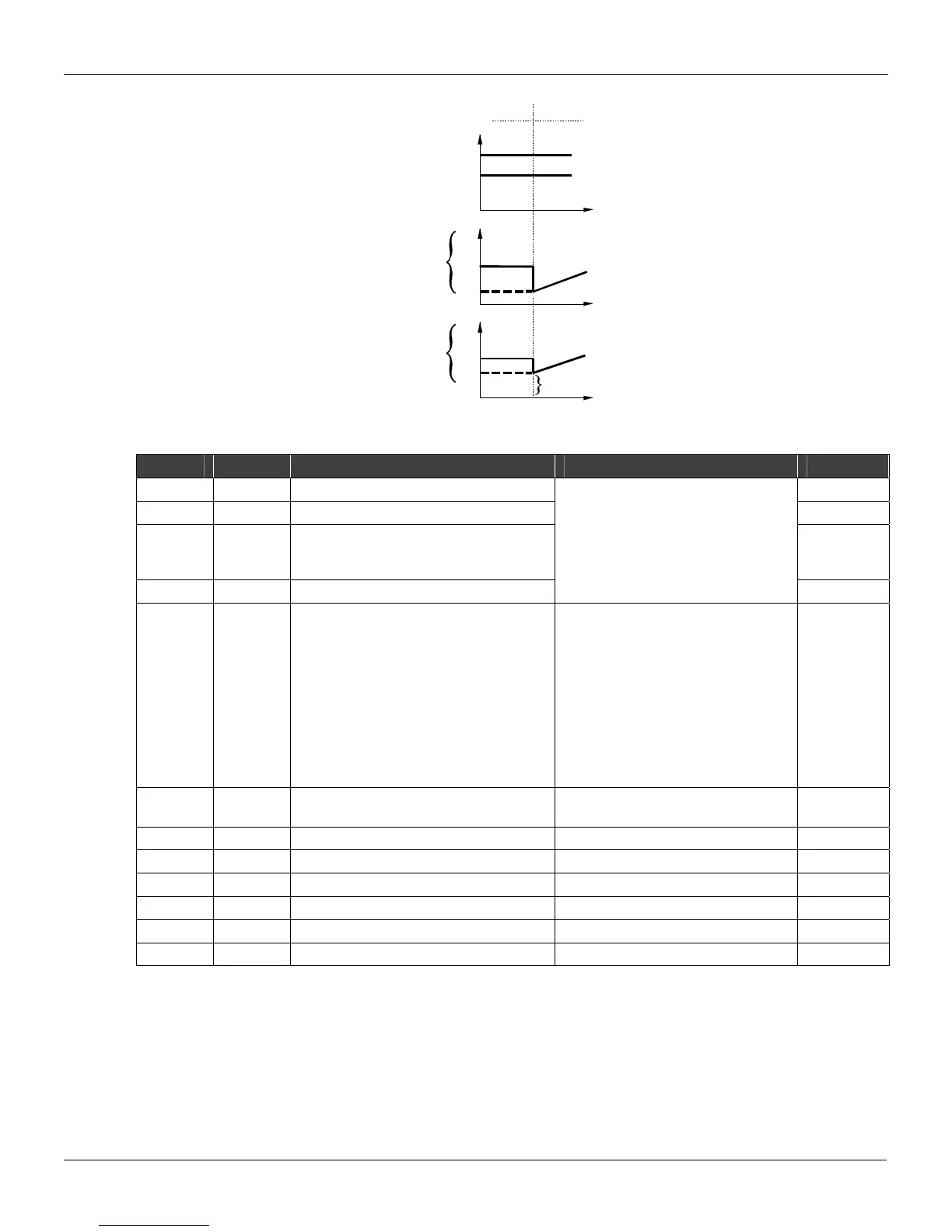
50
OUT
CTYP = 0,1,2 OR 3
(BUMPLESS)
CTYP = 4,5 OR 6
(HARD)
OUT
50
50
SP
40
20
30
t
t
t
PV
) ABIA
ABIA + AKp.e
(b1)
(b2)
AUTOMATIC
Fig 4.9.10 - Manual to Auto Transfer. The Automatic Output Starts with the Bias Value
TYPE MNEM DESCRIPTION RANGE DEFAULT
I LIA SP (Setpoint) Input 0
I LIB PV (Process Variable) Input 0
I LIC
Input for the Control Output
(Feedback), used for Bumpless
transfer.
0
I LID Input for the Auto/Manual Status
Addresses 0 to 170 / 225 to 240
0
I CACT
Control Action and Inhibition of tuning
by the front panel
REVERSE: Output decreases when PV
increases
DIRECT: Output increases when PV
increases
Parallel Ideal Algorithm
0 – Reverse
1 – Direct
2 - Reverse with no tuning on front
3 - Direct with no tuning on front
Noninteractive or ISA
4 – Reverse
5 – Direct
6 - Reverse with no tuning on front
7 - Direct with no tuning on front
0
I CTYP
Type of PID (see Advanced PID
Controller)
0-PI.D/1-PID/2-I.PD(Bumpless) 3-
PI.D/4-PID (Hard)
0
P CARL Antireset-Windup lower limit -2.00 to 50.00% 0.00%
P CARU Antireset-Windup upper limit 50.00 to 102.00% 100.00%
P AKp Proportional Gain 0.00 - 100.00 0.30
R ATr Integral time (min./repetition) 0.01 - 1000.0 10.000
R ATd Derivative term constant (min.) 0.00 - 100.00 0
P ABIA Bias -100.00 - 100.00% 0.00
Number of Bytes per Type of Parameter: A = 12 C = 8 L = 8