Library of Function Blocks
4.17
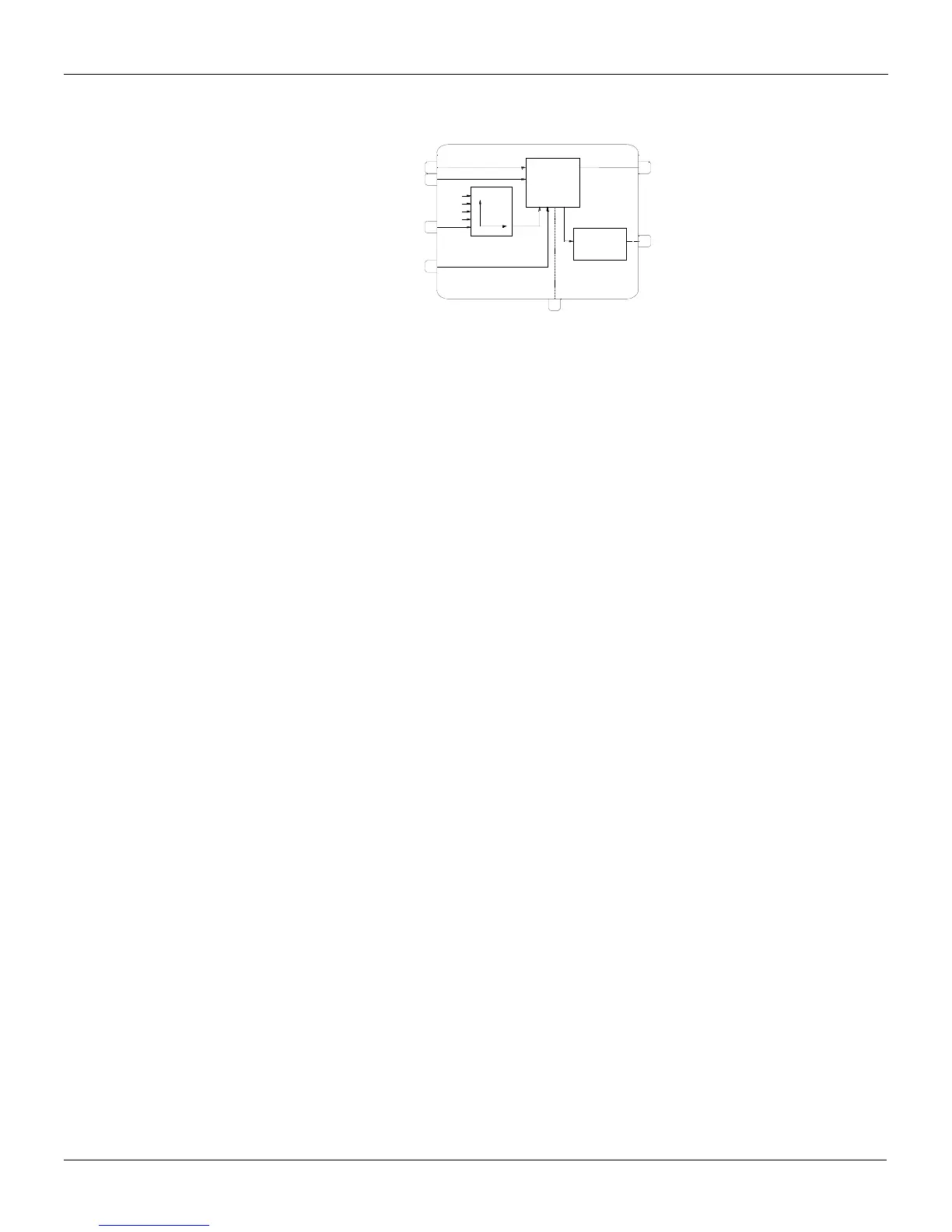
Function 09 - Advanced PID (PID)
SP
PV
DEV
OUT
Y
CURVE n
D
48/50
52/54
FEEDBACK
EXT
TRACK FB
GAIN
SP
PV
DEVIATION
WITH TIME-OUT
LARM
PI.D
PID
I.PD
SAMPLING
B
C
47/49
51/53
E
Operation
This block offers a wide range of control algorithms, using the traditional Proportional (P), Integral (I)
and Derivative (D) modes in various arrangements.
There are two choices of PID algorithm: one is the parallel, ideal and the other is noninteractive, ISA
algorithm. Calculation of the PID prevents the saturation of the output by the integral mode (anti-
reset-windup). Saturation limits are adjustable by the user, a unique feature of the SMAR CD600
Digital Controller, that brings more flexibility to the control strategy.
Manual to Automatic transfer may be bumpless or hard. Bumpless transfer makes the automatic
mode start from the last manual value prior to the switching. Hard transfer will add to this value the
proportional action: (K
p
.e). In both cases the output signal of the block of Function 08 -
Automatic/Manual Station, must be connected to input D (Feedback) and the Status signal of the
Auto/Manual block must be connected to input E (track FB).
This block allows selection of the following control types: Sample and Hold, Quadratic Error, GAP
and Adaptative Gain.
TYPE OF PID (CTYP)
PI.D - The P and I act on the deviation, and D on the Process Variable. In this way, the output signal
follows the changes of the Setpoint according to the Proportional and Integral actions, but does not
give an undesirable impulse due to the Derivative action. This option is the most recommended for
the majority of applications with Setpoint adjustable by the operator.
PID - The P,I and D actions act on the deviation. In this way, the output signal changes when there
are changes on the Process Variable or on the Setpoint. This option is recommended for ratio
control or for the slave controller of a cascade.
I.PD - In this type only the Integral mode acts on the deviation. Changes on the Setpoint cause
variation of the output according to the Integral mode, which is a very smooth effect. It is
recommended for processes that can be upset by abrupt changes of the Setpoint. This is the case
of heating processes with high proportional gain.
PI-SAMPLING - In this option, when there is a deviation, the output signal changes according to the
PI algorithm during a time t
0
. Then, the output signal is kept constant during a time t
1
. If the deviation
persists, the signal will vary again during t
0
, and will remain constant during t
1
. The period is t
0
+t
1
,
(adjusted by CSAM), and the actuation time is t
0
(adjusted by CSON). This type is recommended for
processes with high dead time.