11.1 List of Parameters
11.1.2 List of Parameters
11-22
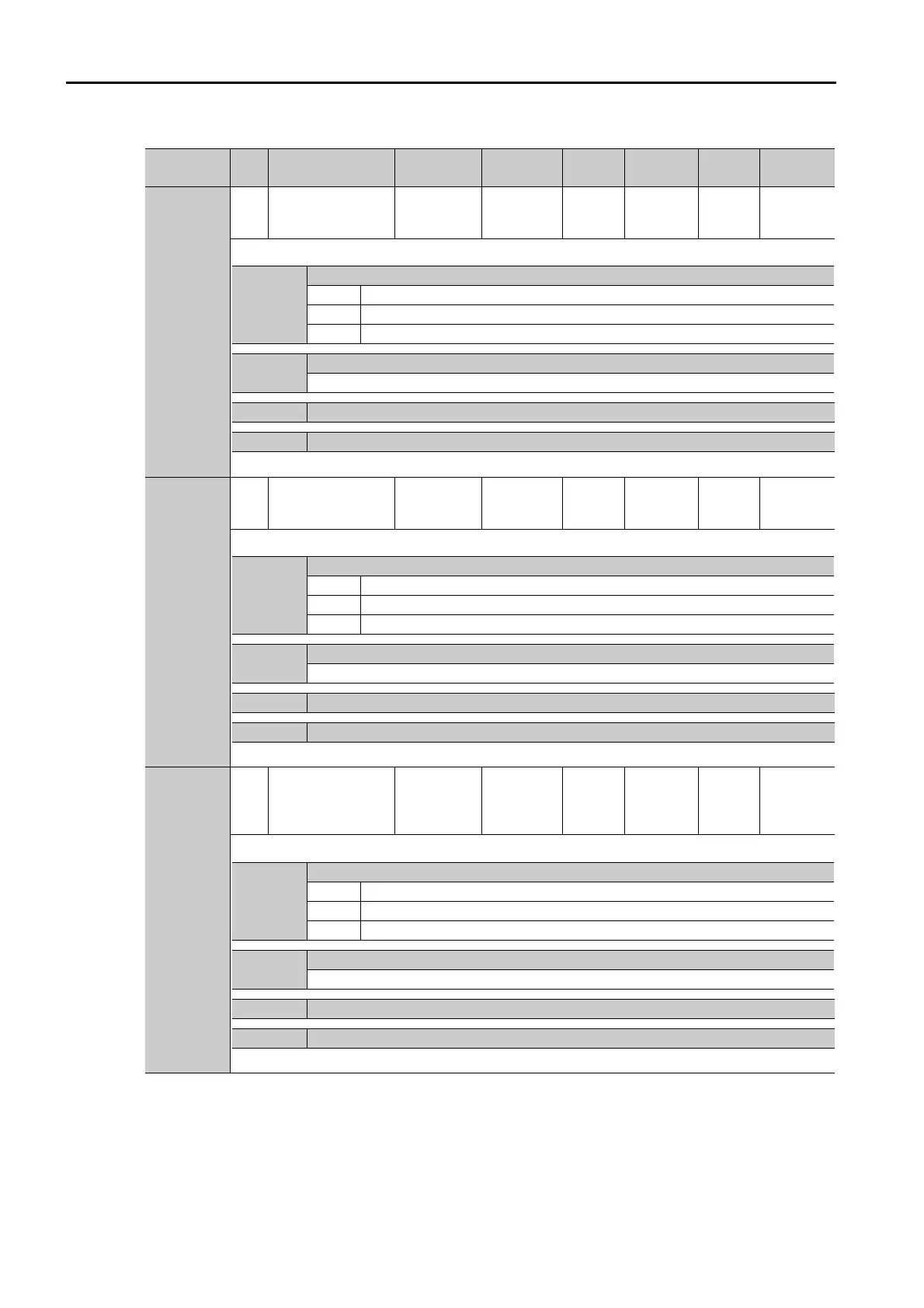
PnBCA
2
/BK
(Brake Output)
Signal Allocation
0000h to
00C2h
− 0002h
After
restart
Setup page 5-14
PnBCB
2
/S-RDY
(Servo Ready)
Signal Allocation
0000h to
00C2h
− 0002h
After
restart
Setup page 5-15
PnBCC
2
/CLT
(Torque Limit
Status Output)
Signal Allocation
0000h to
00C2h
− 0002h
After
restart
Setup page 5-15
Continued on next page.
Continued from previous page.
Parameter
No.
Size Name
Setting
Range
Setting
Unit
Default
Setting
When
Enabled
Classi-
fication
Reference
n.X Signal Usage Method
0 Release the brake when the brake signal turns ON (closes).
1 Release the brake when the brake signal turns OFF (opens).
2 Do not use this signal.
n.X Signal Terminal Number
Same as PnBC0 = n.X.
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
n.X Signal Usage Method
0 Turn ON (close) the output when the servo is ready.
1 Turn OFF (open) the output when the servo is ready.
2 Do not use this signal.
n.X Signal Terminal Number
Same as PnBC0 = n.X.
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
n.X Signal Usage Method
0 Turn ON (close) the output while torque is being limited.
1 Turn OFF (open) the output while torque is being limited.
2 Do not use this signal.
n.X Signal Terminal Number
Same as PnBC0 = n.X.
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
 Loading...
Loading...






