3 Specifications and Dimensional Drawings
3.6.1 SGMDH Servomotors (2000min
-1
) With Holding Brakes
3-40
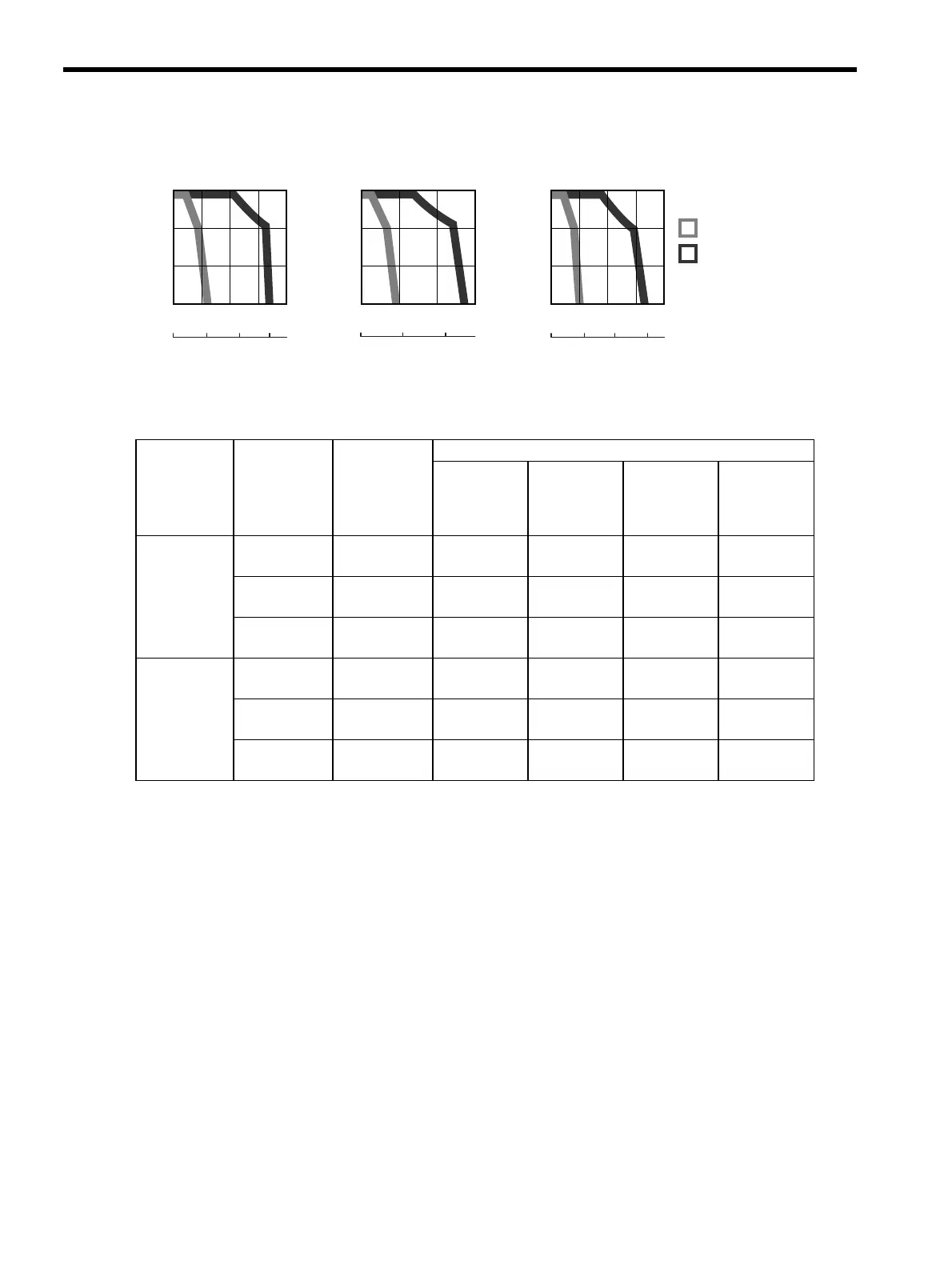
(2) Torque-motor Speed Characteristics
(3) Holding Brake Electrical Specifications
Note: The holding brake is only used to hold the load and cannot be used to stop the servomotor.
SGMDH-22AAB
0
2000
1000
3000
2000
1000
3000
010203040
AB
SGMDH-40AAB
0
2000
1000
3000
020406080
AB
SGMDH-32AAB
0
0 204060
AB
200 300
1000
4002000
400
600
2000
Torque (Nm)
Torque (
lbin)
A
B
: Continuous Duty Zone
: Intermittent Duty Zone
Motor
speed
(min
-1
)
Motor
speed
(min
-1
)
Motor
speed
(min
-1
)
Torque (Nm)
Torque (
lbin)
Torque (Nm)
Torque (
lbin)
Holding
Brake Rated
Voltage
Servomotor
Model
Servomotor
Capacity
W
Holding Brake Specifications
Capacity
W
Holding
Torque
N·m (lb·in)
Coil
Resistance
Ω (at 20 °C
(68 °F))
Rated
Current
A (at 20 °C
(68 °F))
90VDC
SGMDH-22 2200 16.0
29.4
(260)
505 0.18
SGMDH-32 3200 16.0
29.4
(260)
505 0.18
SGMDH-40 4000 16.0
29.4
(260)
505 0.18
24VDC
SGMDH-22 2200 16.0
29.4
(260)
36.0 0.67
SGMDH-32 3200 16.0
29.4
(260)
36.0 0.67
SGMDH-40 4000 16.0
29.4
(260)
36.0 0.67

 Loading...
Loading...