3 Specifications and Dimensional Drawings
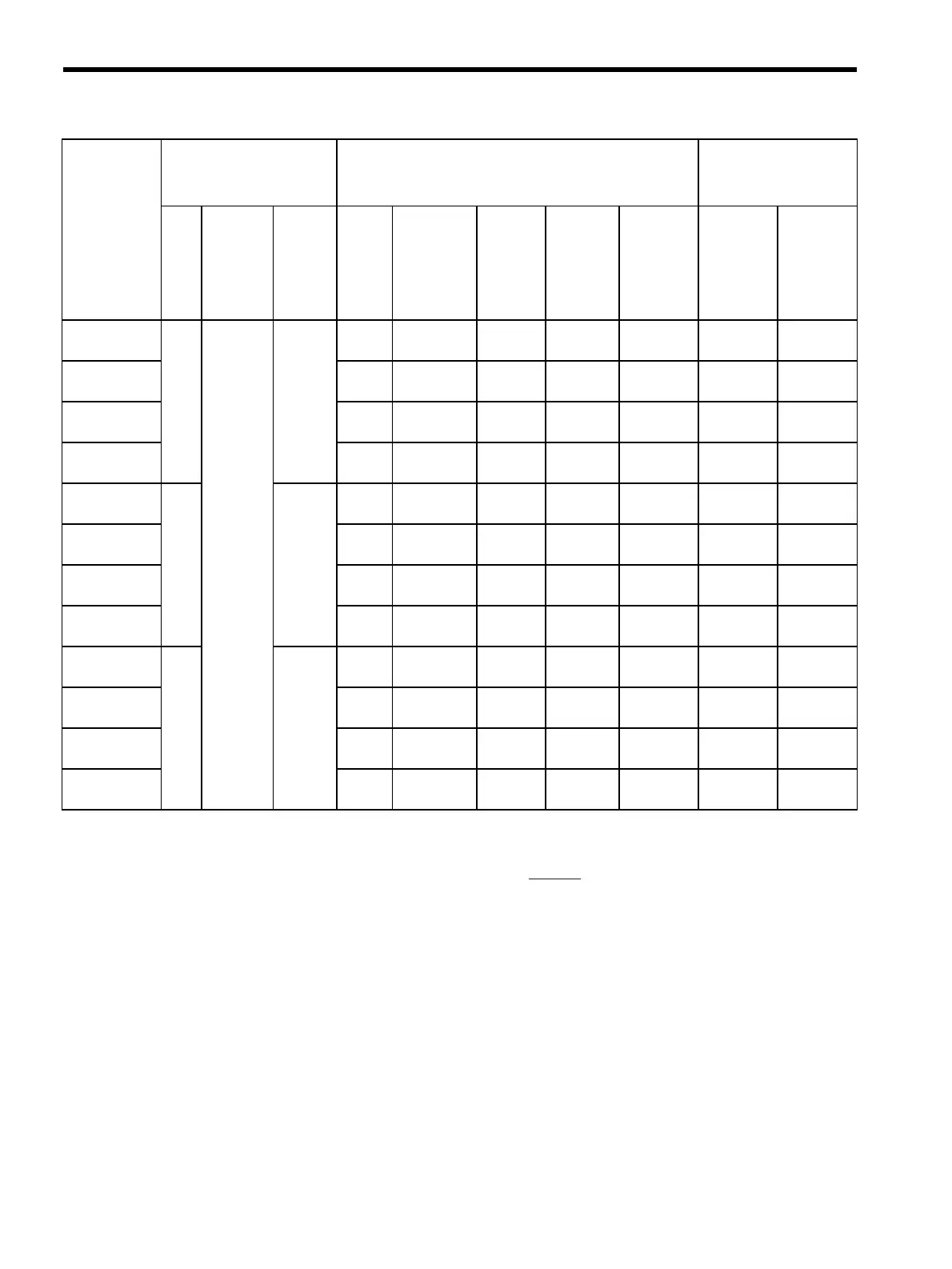
3.1.3 SGMAH Servomotors With Low-backlash Gears
3-8
* 1. Maximum motor speed is up to 4000 min
-1
at the shaft.
* 2. Gear output torque is expressed using the following equation.
(Gear output torque) = (servomotor output torque) × × (efficiency)
3.1.3 SGMAH Servomotors With Low-backlash Gears
04AAJ1
400
3000
1.27
(179.8)
1/5
5.08/80
(719/80)
17.2
(2436)
600 800
0.366
(5.18)
0.193
(2.73)
04AAJ3
3/31
10.5/80
(1487/80)
35.5
(5027)
290 387
0.353
(5.00)
0.180
(2.55)
04AAJC
1/21
21.3/80
(3016/80)
72.2
(10224)
143 190
0.403
(5.71)
0.230
(3.26)
04AAJ7
1/33
33.5/80
(4744/80)
113.0
(16001)
91 121
0.338
(4.79)
0.165
(2.34)
07DAJ1
650
2.07
(293.1)
1/5
8.28/80
(1173)
32.0
(4531)
600 800
1.12
(15.86)
0.450
(6.37)
07DAJ3
3/31
17.1/80
(2422)
66.6
(9431)
290 387
1.10
(15.58)
0.425
(6.02)
07DAJC
1/21
34.8/80
(4928)
134
(18974)
143 190
1.15
(16.29)
0.475
(6.73)
07DAJ7
1/33
54.6/80
(7732)
212
(30019)
91 121
0.972
(12.76)
0.300
(4.25)
08AAJ1
750
2.39
(338)
1/5
9.56/80
(1354/80)
32
(4531)
600 800
1.12
(15.9)
0.450
(6.37)
08AAJ3
3/31
19.8/80
(2804/80)
66.6
(9431)
290 387
1.10
(15.6)
0.425
(6.02)
08AAJC
1/21
40.2/80
(5692/80)
134
(18974)
143 190
1.15
(15.3)
0.475
(6.73)
08AAJ7
1/33
63.1/80
(8935/80)
213
(30019)
91 121
0.972
(13.8)
0.300
(4.25)
Servomotor
Model
SGMAH-
Servomotor Gear Output
Moment of Inertia J
×10
-4
kg·m
2
(x 10
-3
oz·in·s
2
)
Out-
put
W
Rated
Speed
min
-1
Rated
Torqu e
Nxm
(ozxin)
Gear
Ratio
Rated
Torque/
Effi-
ciency
∗
2
N·m/%
(oz·in/%)
Instanta-
neous
Peak
Torque
N·m
(oz·in)
Rated
Speed
min
-1
Max.
Speed
∗1
min
-1
Motor +
Gears
Gears
1
gear ratio
( )
• Time Rating: Continuous • Thermal Class: B
• Vibration Class: 15 µm or below • Withstand Voltage:
100V, 200V Servomotors: 1500 VAC for one minute
400V Servomotors: 1800 VAC for one minute
• Insulation Resistance: 500 VDC, 10 MΩ min. • Enclosure: Totally enclosed, self-cooled, IP55 (except
for shaft opening)
• Ambient Temperature: 0 to 40°C (32 to 104°F) • Ambient Humidity: 20% to 80% (no condensation)
• Excitation: Permanent magnet • Drive Method: Direct drive
• Mounting: Flange method • Backlash: 3 min max.
• Gear Mechanism: Planetary gear mechanism • Gear Rotation Direction: Same direction as servomotor