8.1 Trial Operation
8-9
8
8.1.2 Trial Operation for Servomotor without Load from Host Reference
Check that the servomotor move reference or I/O signals are correctly set from the host controller to the SERVO-
PACK. Also check that the wiring and polarity between the host controller and SERVOPACK, and the SERVO-
PACK operation settings are correct. This is final check before connecting the servomotor to the machine.
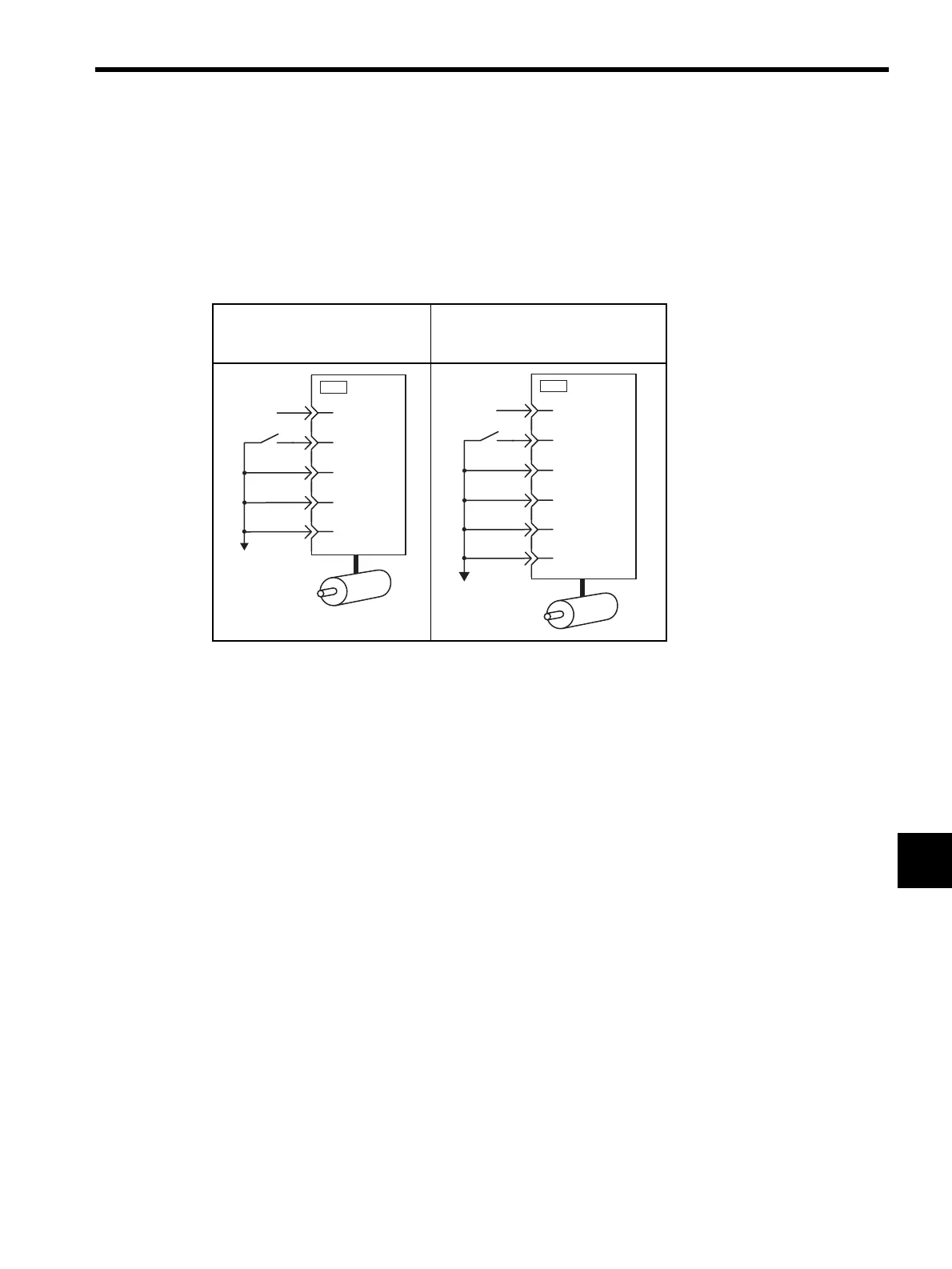
(1) Servo ON Command from the Host
The following circuits are required: External input signal circuit or equivalent.
Change the SEN signal (CN1-4) to the H level when an absolute encoder is used.
Speed Control
(Standard Setting)
[Pn000=n.0]
Position Control
[Pn000=n.1]
47
CN1
+24V
/S-ON
P-OT
N-OT
V-REF
40
42
43
5
0V
47
CN1
+24V
/S-ON
P-OT
N-OT
PULS
40
42
43
7
SIGN
11
0V