8 Operation
8.5.7 Encoder Signal Output
8-46
If using the SERVOPACK’s phase-C pulse output for a zero point return, rotate the servomotor twice or
more before starting a zero point return. If the configuration prevents the servomotor from rotating the ser-
vomotor or more, perform a zero point return at a motor speed of 600 min
-1
or below. If the motor speed is
faster than 600 min
-1
, the phase-C pulse output may not be output correctly.
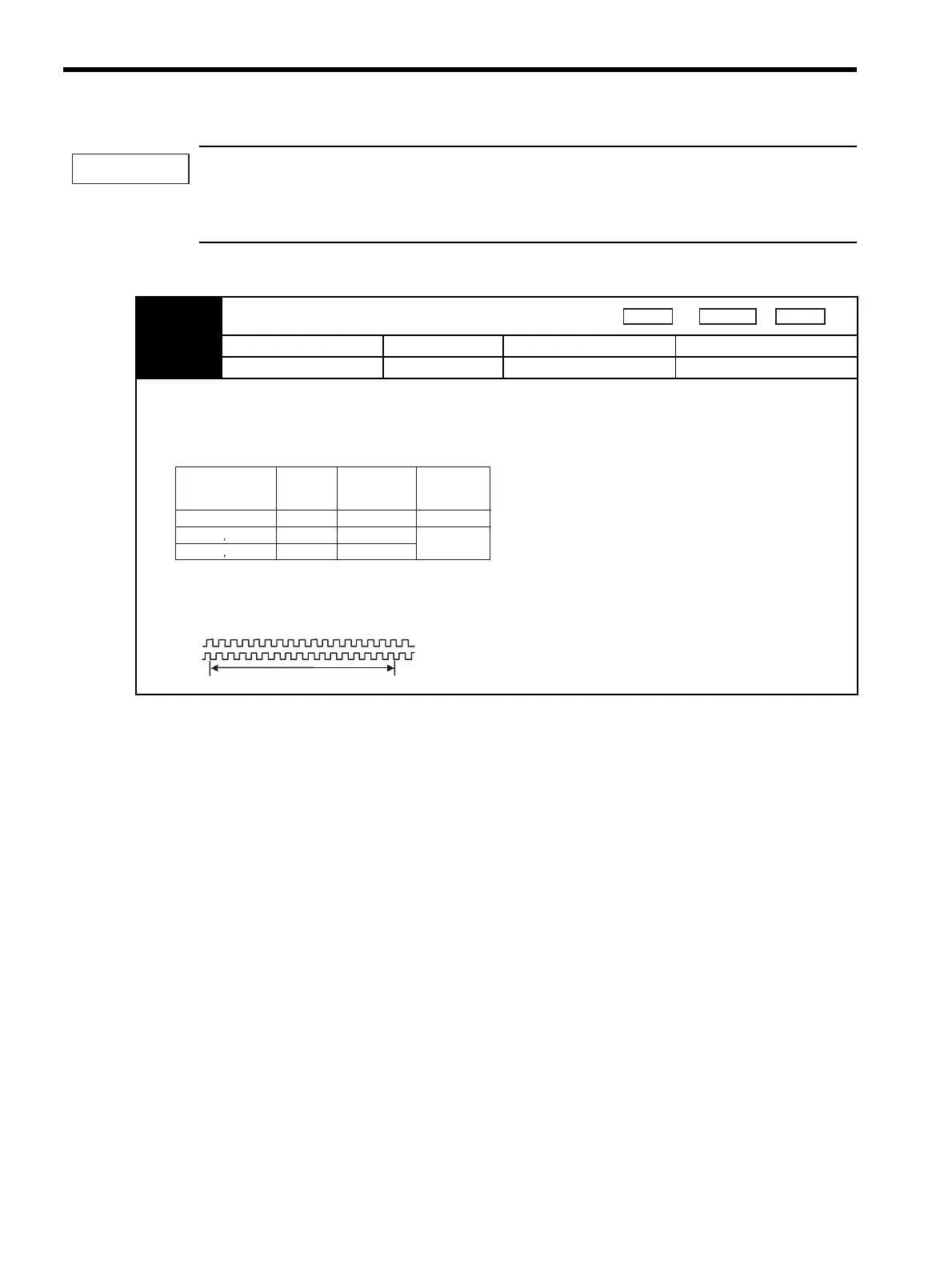
• Pulse Dividing Ratio Setting
IMPORTANT
Pn201 PG Divider
Setting Range Setting Unit Factory Setting Setting Validation
16 to 16384 P/Rev 16384 After restart
Set the number of pulses for PG output signals (PAO, /PAO, PBO, /PBO) externally from the SERVOPACK.
Feedback pulses from the encoder per revolution are divided inside the SERVOPACK by the number set in Pn201 before
being output. (Set according to the system specifications of the machine or host controller.)
The setting range varies with the number of encoder pulses for the servomotor used.
Output Example
Pn201=16 (when 16 pulses are output per revolution)
Speed
Position
Torque
Motor Model
Encoder
Specifications
Setting
Range
No. of Pulses
(P/R)
A 13 16 to 2048
16 to 16384
2048
16384
32768
16
17
B
1
C
1
Resolution
(Bit)
Preset value: 16
1 revolution
PAO
PBO

 Loading...
Loading...