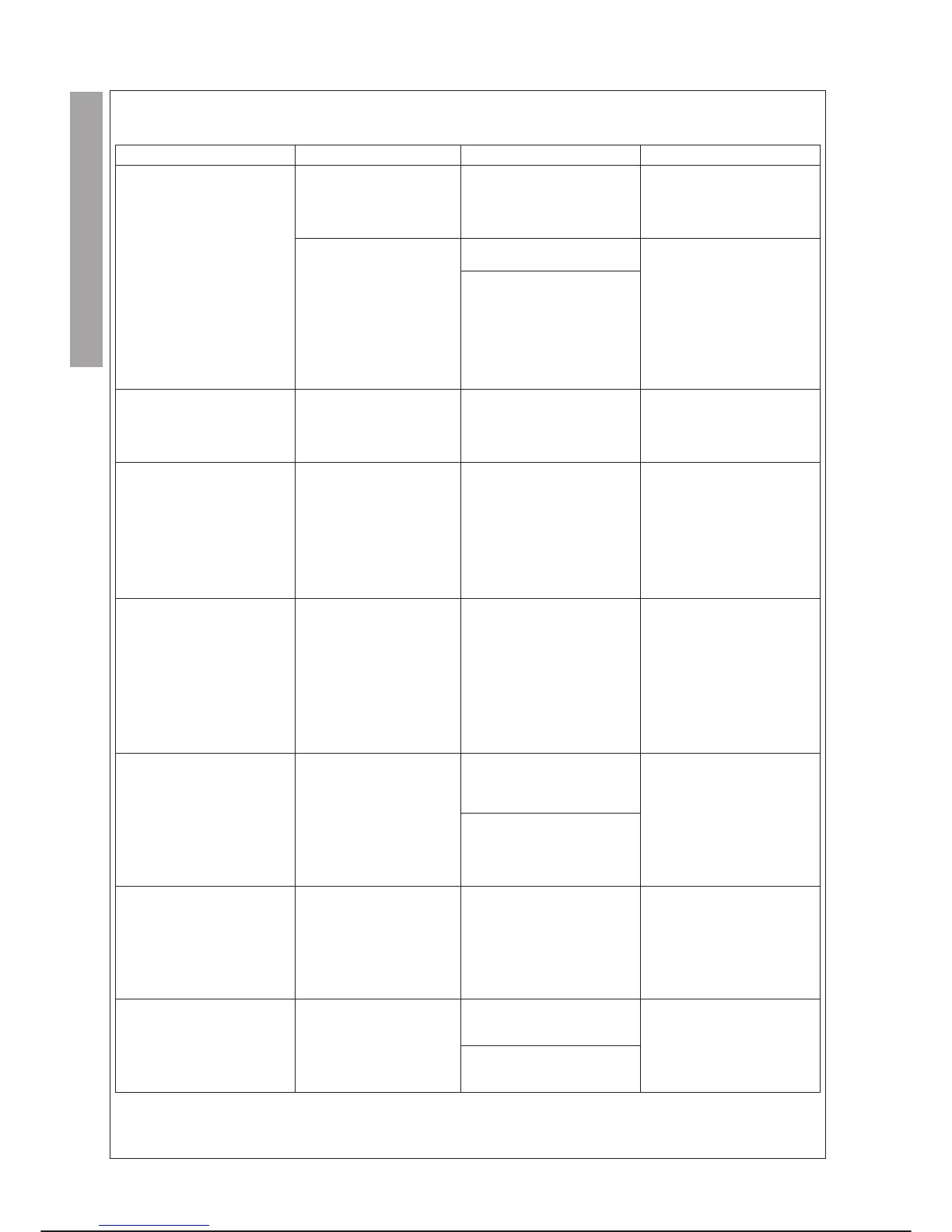
TROUBLESHOOTING INDICATIONS
Alarm/Warning Context Cause/Remedy References
28707-10:
Safety chain circuit open
SAU2
Faulty (SFT led on)
Check circuits of Brakes, Motor
thermal switch, Overtravel
·
Circuit diagram
·
SAU2 Tables
·
Consult cause/remedy with
PCINT programme
Normal operation Check the safety circuit
·
Use of safety circuit test de
-
vice (connector X113)
Check the dynamic braking
enabling contact (C3G-DBU3)
·
C3G Plus and Robot Circuit
Diagram
·
Module C3G-DBU3 circuit on
Circuit diagram
·
Consult cause/remedy with
PCINT programme
61440-10:
SAX xxx motion under no servo
control
After an emergency or
blackout
Parking brakes
oxidised/Perform 4-5
emergency stops at low speed
paying attention to the stopping
spaces needed.
·
Consult cause/remedy with
PCINT programme
63492-11:
SAX xxx drive brake locked
Executing the DRIVE ON
command
·
Check for the presence of 25 V
on power device G100
·
C3G Plus and Robot Circuit
Diagram
·
Power contactors closure
check (brakes circuit and
connector X6 SAU2).
·
Short circuits check on
brakes circuit from SAU2 to
motor.
·
SAU2 signals tables on Cir
-
cuit diagram.
·
Consult cause/remedy with
PCINT programme
63493-11.
SAX xxx DC bus or motor cable
short circuit
Executing the DRIVE ON
command or during DRIVE
ON status
Check whether the motor
windings are open or in short
circuit.
Short circuit or open circuit
check on motor wiring from
SAU2 to motor.
If there is no short circuit or
open circuit , replace the Axis
power module.
· C3G Plus and Robot Circuit
Diagram
·
SAU2 signals tables on Cir-
cuit diagram.
·
Consult cause/remedy with
PCINT programme
61442-11:
SAX xxx following error out of
range
During a movement of the
normal automatic work cycle
Unbalancing of motor
phases/check fuses and
impedance of the motor
winding.
·
C3G Plus and Robot Circuit
Diagram
Resolver reading
problems/Check the resolver
windings and annex “22’ DIFF.
2-AXIS I/O INTERFACE
ANNEX”
·
Consult cause/remedy with
PCINT programme
Robot collision with alarm
61442-11: SAX xxx following
error out of range
Robot collision during work
cycle
Calibration position check (for
example, execute instruction
MOVE TO $CAL.SYS).If the
position is not correct, the
system may have calculated a
wrong resolver speed value.
Run the turn_set procedure on
the axes to be positioned.
·
Consult chapter 2 of the
manual, step 11 “TURN_SET
Operation” (for turn_set oper
-
ation)
·
61441-13:
SAX xxx bad resolver
reading
During normal automatic
work cycle
Check the resolver windings
·
C3G Plus and Robot circuit
diagram
·
62468-13:
SAX xxx resolver open or
short circuit
Check the mobile parts of
wiring on board robot
·
Consult cause/remedy of
PCINT programme
MAINTENANCE C3G Plus
7-38 08/0702
problems of operation