Chapter 4 Parameters
4-60
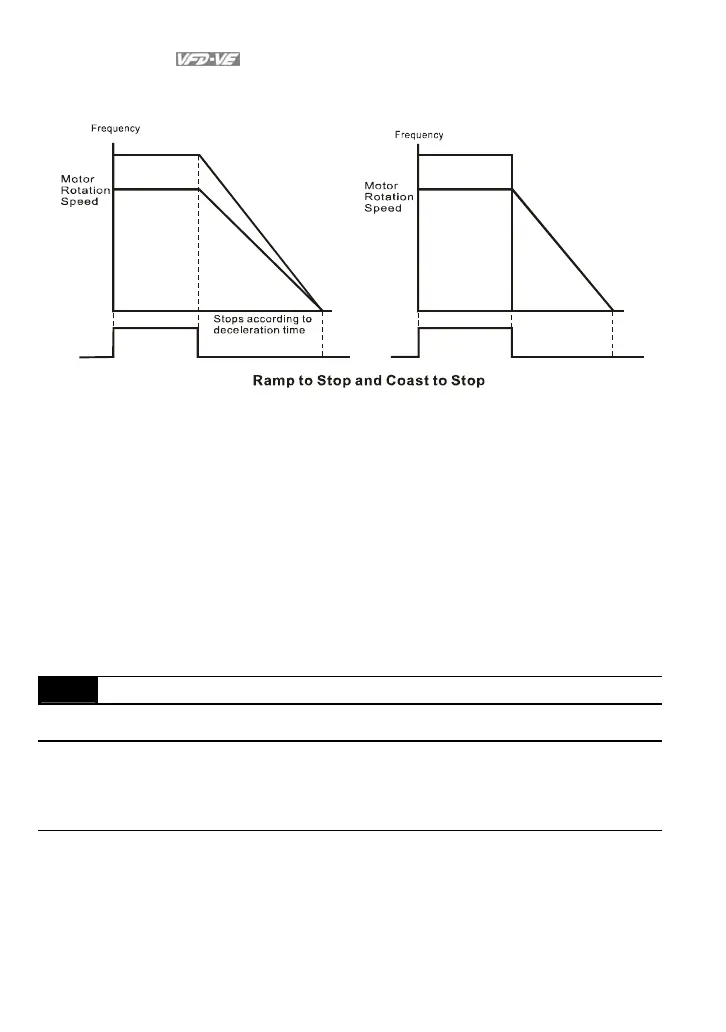
The parameter determines how the motor is stopped when the AC motor drive receives
a valid stop command.
Operation
Command
Operation
Command
Time
Time
Free running
to stop
Output
Frequency
RUN STOP RUN STOP
Output
Frequency
Ramp to stop: the AC motor drive decelerates from the maximum output frequency (Pr. 01-
00) to minimum output frequency (Pr. 01-09) according to the deceleration time and then
stop.
Coast to stop: the AC motor drive stops the output instantly upon a STOP command and
the motor free runs until it comes to a complete standstill.
(1) It is recommended to use “ramp to stop” for safely of personnel or to prevent material
from being wasted in applications where the motor has to stop after the drive is stopped.
The deceleration time has to be set accordingly.
(2) If the motor free running is allowed or the load inertia is large, it is recommended to
select “coast to stop”. For example, blowers, punching machines and pumps.
The stop method of the torque control is also set by Pr.00-22.
00-23
Motor Direction Control
Control
mode
VF VFPG SVC FOCPG TQCPG
Factory setting: 0
Settings 0
Enable forward/reverse
1
Disable reverse
2
Disable forward
This parameter enables the AC motor drives to run in the forward/reverse Direction. It
may be used to prevent a motor from running in a direction that would consequently
injure humans or damage the equipment.