Chapter 4 Parameters
4-182
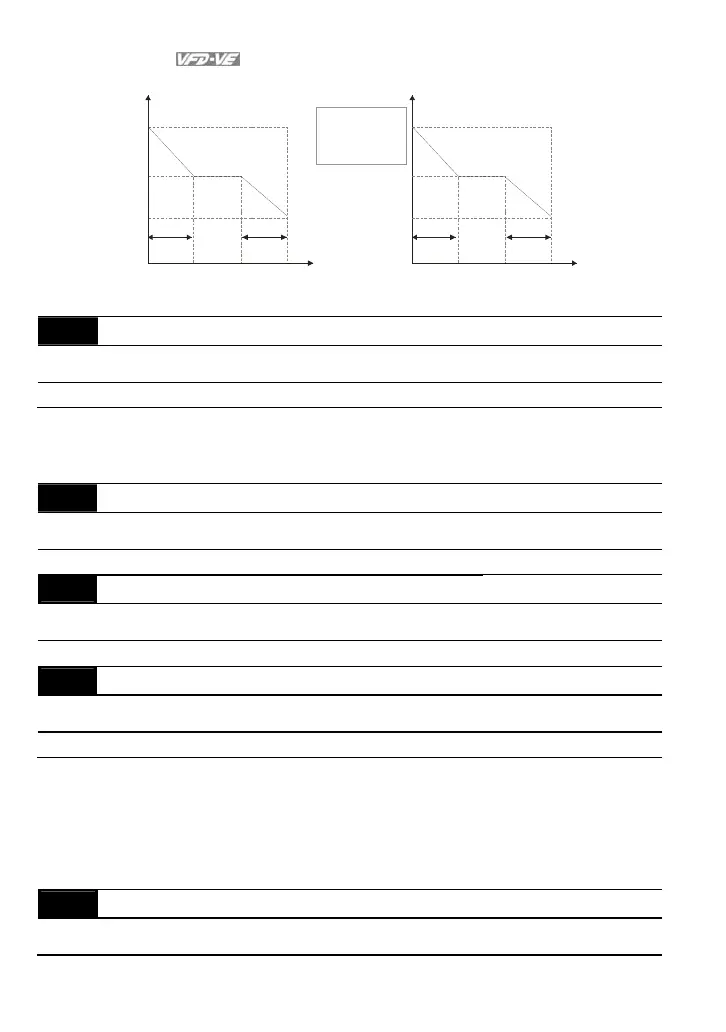
PI
Hz
10-06
10-07
10-04
10-05
10-21
10-22
0Hz
10-08
5Hz 5Hz
PI
Hz
11-03
11-02
0Hz
10-08
5Hz 5Hz
PI adjustment-manual gain
PI adjustment-auto gain
1. Pr. 11-01 value
2. set Pr.11-00 to bi t 0=1
Pr.11-11
use to adjust the
strengt h of zero-
servo loc k
11-01 Per Unit of System Inertia Unit: 1
Control
mode
FOCPG TQCPG
Factory Setting: 400
Settings 1 to 65535 (256=1PU)
To get the system inertia from Pr.11-01, user needs to set Pr.11-00 to bit1=1 and execute
continuous forward/reverse running.
11-02 Low-speed Bandwidth Unit: 1
Control
mode
VFPG FOCPG TQCPG
Factory Setting: 10
Settings 0 to 40Hz
11-03 High-speed Bandwidth Unit: 1
Control
mode
VFPG FOCPG TQCPG
Factory Setting: 10
Settings 0 to 40Hz
11-11 Zero-speed Bandwidth Unit: 1
Control
mode
VFPG FOCPG TQCPG
Factory Setting: 10
Settings 0 to 40Hz
After estimating inertia and set Pr.11-00 to bit 0=1 (auto tuning), user can adjust
parameters Pr.11-02, 11-03 and 11-11 separately by speed response. The larger number
you set, the faster response you will get. Pr.10-08 is the switch frequency for low-
speed/high-speed bandwidth.
11-04 PDFF Gain Value Unit: 1
Control
mode
FOCPG
Factory Setting: 30