User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN 49
Innomar Technologie GmbH (2023-01) 49
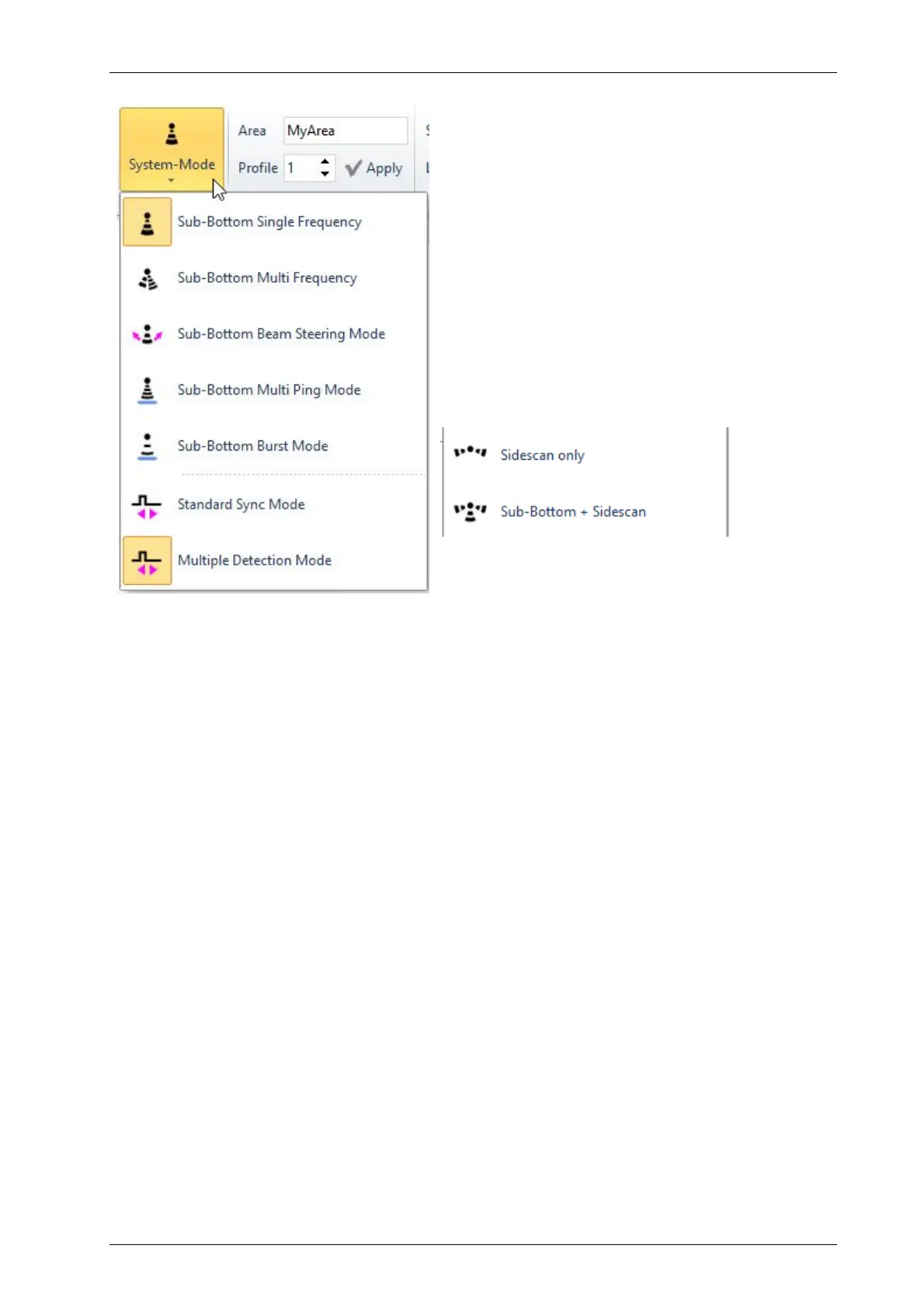
System Mode
Here you select how you like to operate the system.
Echo print areas of the SESWIN window are shown
according to these settings.
If data recording is switched on, you can’t change
the operation mode and this menu item is disabled.
This item is not available with the INNOMAR
“smart” model.
For the INNOMAR “light-plus” and “standard-plus”
models there are two additional system modes:
SBP transmit modes:
SBP Single Frequency: used to transmit pings with same centre frequency and pulse
width as set in the “Home – Transmit” menu. This is the default SBP mode.
SBP Multi Frequency: used to transmit consecutive pings with different pulse settings
(centre frequency and/or pulse width). Settings for this mode are made in the “System
Setup – Settings – General – Special Transmit Modes” menu, see 5.11.6 on page 63.
SBP Beam Steering Mode: used to transmit consecutive pings with same centre
frequencies and pulse width as set in the “Home – Transmit” menu, but at different angles.
Angle settings for this mode are made in the “System Setups– General – Special Transmit
Modes” menu (INNOMAR “standard” and “medium-100” models only). This is not for
beam stabilisation, for that feature see section 5.11.14 on page 70.
SBP Multi Ping Mode and SBP Burst Mode: used to increase the ping rate in deeper
waters, see section 6.4 on page 88 for details. This is not available for the INNOMAR
“smart” and “compact” models.
Synchronisation modes:
Standard Sync Mode: All pings are released with the same (equidistant) timing.
Multiple Detection Mode: Every second ping is released with a small delay. This helps
to detect (and remove) multiple reflections in (very) shallow waters, see below.
If the range is set to twice the water depth and more, multiple reflections from the seafloor
may be visible. At smaller ranges and high ping rates (typically for shallow water
applications) you will see also multiples from previous pings that are “mapped” into the
visible range (see sketch below). With “Multiple Detection Mode” these inter-ping
multiples can be distinguished from real signals and may be removed by a median filter.