Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 479 of 909
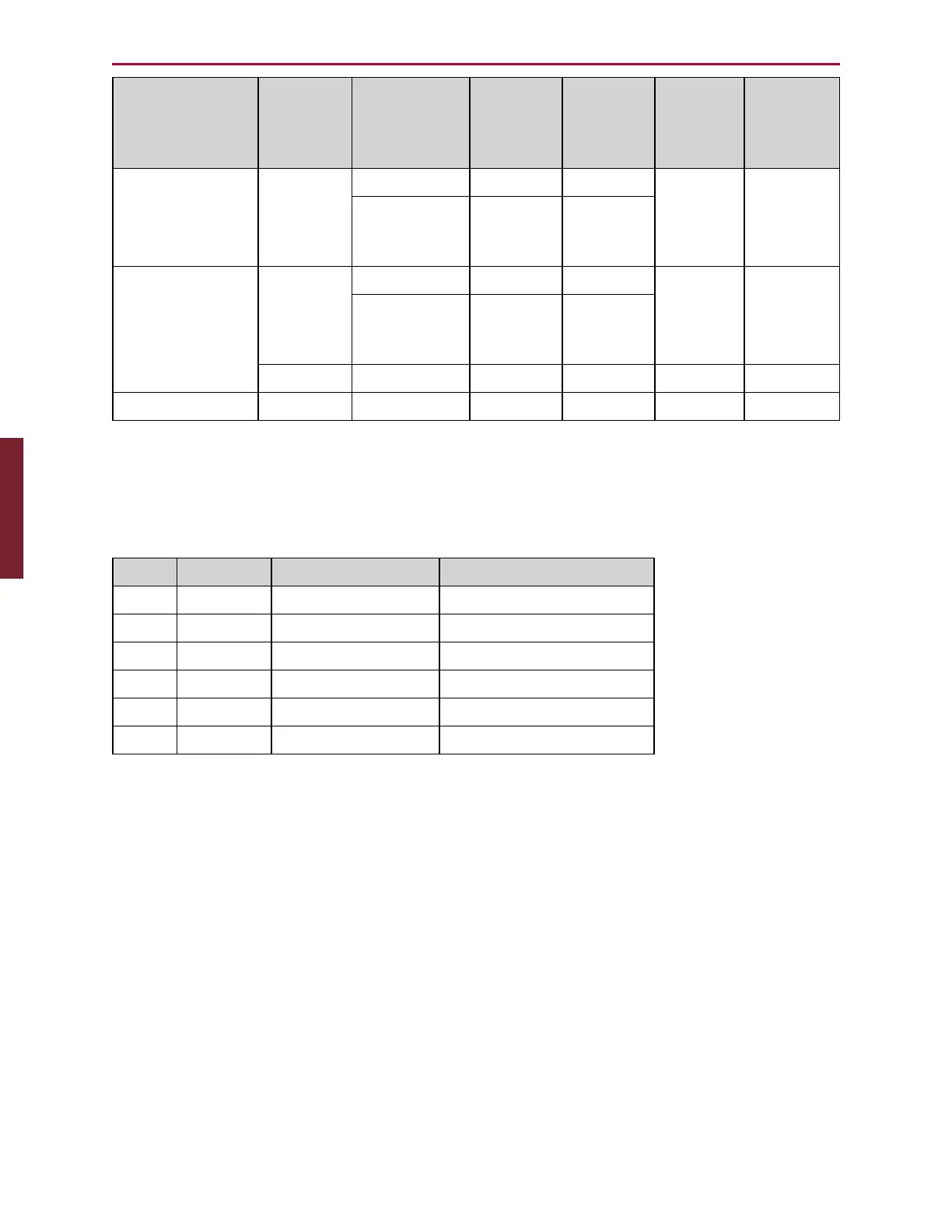
Motor
Type
word
Allowed
Values
IO
Allowed
Range
Logic 0
Voltage
Logic 1
Voltage
Output
Word
Value
Range
Bitmask
Range
D-style 0 0-6 0 5 0 to 255 0 to 255
7 (virtual
only, not con-
nected)
N/A N/A
D-style with AD1
option
0 0-6 0 5 0 to 255 0 to 255
7 (virtual
only, not con-
nected)
N/A N/A
1 16-25 0 24 0 to 1023 0 to 1023
M-style 0 0-10 0 24 0 to 2047 0 to 2047
NOTE: D-style motor's bit #7 does not connect to any physical I/O but does
remember the state it was set to.
Logical I/O User Read Commands Example for Class 5 M-style Motor
The following example describes the RIN() commands used for reading logical I/Ostatus on
the Class 5 M-style motor.
Pin Conn Desc User Read Command
1 12 pin I/O-0 RIN(0)
. . .
4 5 pin I/O-2 RIN(2)
. . .
9 12 pin Not Fault Output RIN(11)
10 12 pin Drive Enable Input RIN(12)
Further, other commands are available for this purpose:
l
Bits returned by Status Word 16, RW(16); for example:
RW(16) 2048
where "RW(16)" is the command typed in the Terminal Window; it returns "2048"
indicating bit 7 is on. For more details on Status Word 16, see Status Word: 16 On
Board Local I/O Status: M-Style Motor on page 886. For more details on the RW(16)
command, see RW(word) on page 793.
l
Bits returned by RIN(W,0); for example:
RIN(W,0) 2048
where "RIN(W,0)" is the command typed in the Terminal Window; it returns "2048"
indicating bit 7 is on. For more details on Status Word 16, see Status Word: 16 On
Board Local I/O Status: M-Style Motor on page 886. For details on the RIN(W,0)
command, see the Detailed Description section of this topic.
Part 2: Commands: IN(...)