Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 889 of 909
Ambient Temperature Effects on Torque Curves and Motor Response:
If the motor is operated in an environment warmer than 25ºC, it will reach its thermal limit
faster for a given load and further limit continuous torque. Therefore, any given motor torque
curve must be linearly derated for a given ambient temperature from 25ºC to 85ºC for all
Class 5 SmartMotor servos.
Supply Voltage Effects on Torque Curves and Motor Response:
Higher voltages have a two-fold effect on torque curves. As mentioned previously, raising the
voltage shifts the curve to the right; it also allows higher current into the drive. However,
torque curves depict maximum allowable torque at a given velocity.
If you double the supply voltage, the motor can sustain twice the original velocity.
Acceleration is also increased due to an increase in the peak torque curve. This may
potentially be a significant reduction of time to complete moves due to the a*t
2
term in
kinematic equations. This is useful for high-speed indexing and fast start/stop motion.
NOTE: All torque curves shown in the Moog Animatics Product Catalog also show
the shaft output power curves.
Power can be calculated with the following equation:
Power (W
*
) = Torque (N.m) x Speed (RPM) / 9.5488
*In some versions of Moog Animatics literature, this was incorrectly shown as "kW".
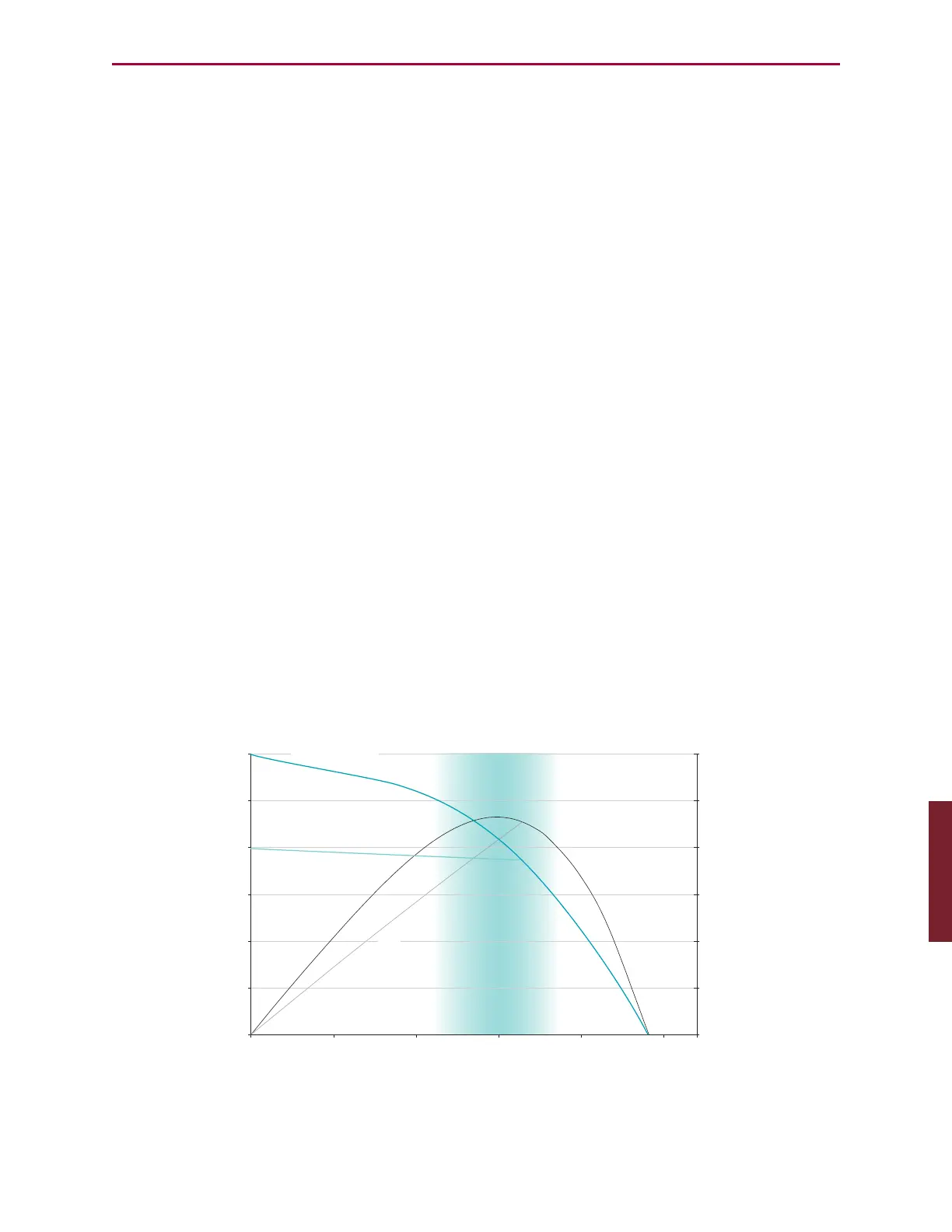
For any given mechanical system being moved by a SmartMotor, it is ideal to ensure the
motor is running within its optimum performance range (see the following figure). Through
proper mechanical system design, this can be achieved by adjusting one or more of the
following items:
l
Gear reduction
l
Belt reduction
l
Lead screw pitch
l
Pinion gear diameter
Ideal Operating
Bandwidth
Velocity
Torque
Power
Peak Torque
Co
n
tin
u
ous Torqu
e
Continuous P
ower
Peak Power
Ideal Operating Bandwidth
Appendix: Ambient Temperature Effects on Torque Curves and Motor Response: