3
05.01
3.5 Overview, position sensing
3-68
Siemens AG 2001 All rights reserved
SIMODRIVE 611 Planning Guide (PJU) – 05.01 Edition
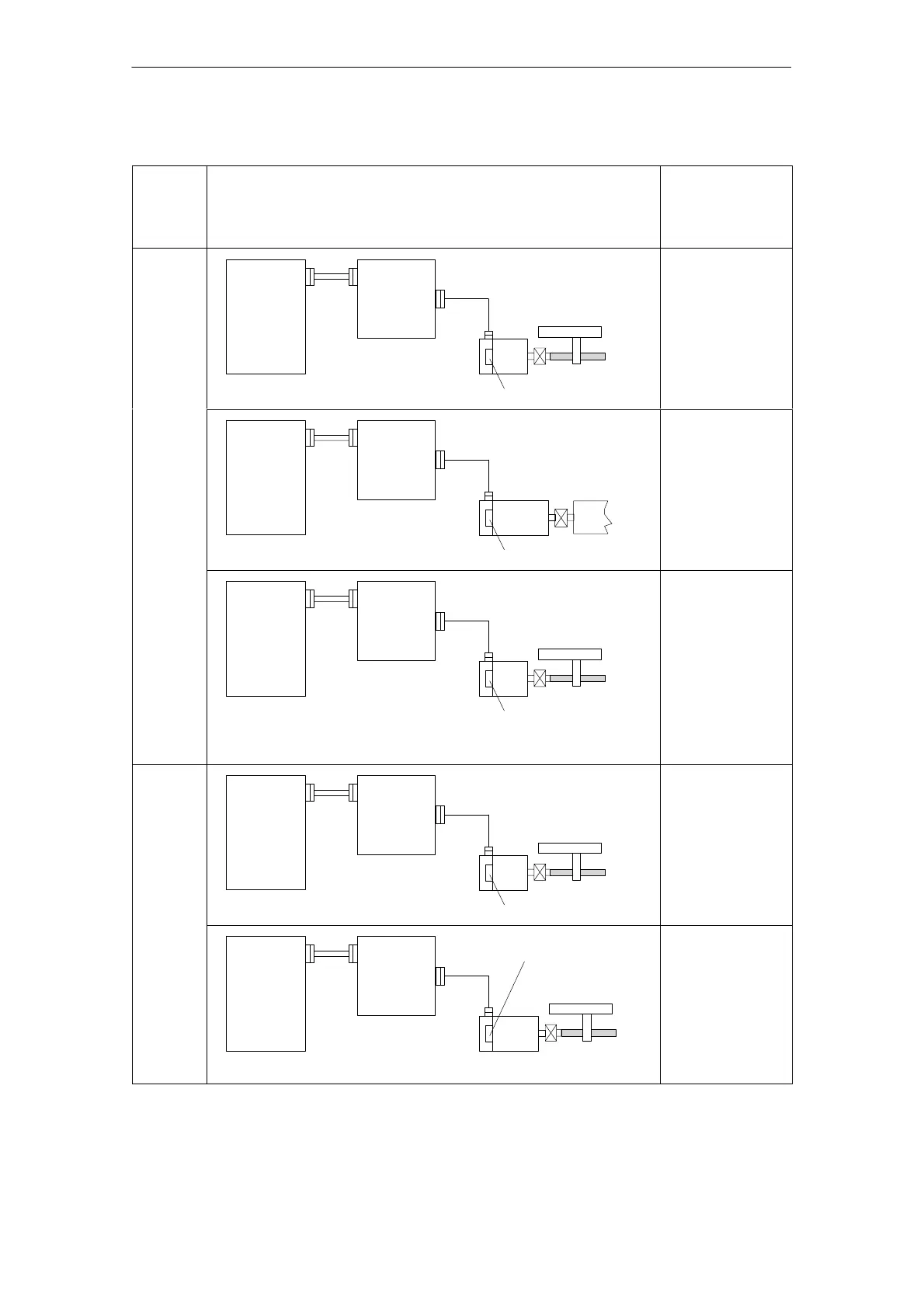
Table 3-3 Indirect position (motor rotor position) and motor speed sensing, digital controls
Control
board
version
Indirect position (motor rotor position)
and motor speed sensing, digital controls
M: Max. possible
measuring steps
G: Encoder system
accuracy
Z: Pulse number
Drive
control
Perfor–
mance
Digital
FD and
MSD basic
version
SIMODRIVE
drive
module
Positioning with NC
n*
1FT6
SINUMERIK
with digital
coupling
(digital)
Incremental
l 50 m
1FK6
M = 2048 ⋅ Z
per 360 degrees
mech.
Z = 2048
G = " 0.006 degrees
SIMODRIVE
drive
module
n*
1PH4/6/7
SINUMERIK
with digital
coupling
(digital)
Incremental
Spindle positioning with the NC
l 50 m
M = 2048 ⋅ Z
per 360 degrees
mech.
Z = 2048
G = " 0.006 degrees
Incremental and
multi–turn, absolute
Positioning with NC
SIMODRIVE
drive
module
n*
1FT6
1FK6
1PH
SINUMERIK
with digital
coupling
(digital)
l 50 m
M = 2048 ⋅ Z
per 360 degrees
mech.
Z = 2048
G = " 0.006 degrees
multi–turn absolute
4096 revolutions
Drive
control
standard
SIMODRIVE
drive
module
Positioning with NC
n*
1FT6
SINUMERIK
with digital
coupling
(digital)
Incremental
l 25 m
1FK6
M =
Z = 2048
G = " 0.006 degrees
M = 128 ⋅ Z
per 360 degrees
mech.
Digital
FD
basic
version
SIMODRIVE
drive
module
n*
1FT6
1FK6
SINUMERIK
with digital
coupling
(digital)
incremental and
multi–turn absolute
Positioning with NC
l 25 m
M = 128 ⋅ Z
per 360 degrees
mech.
Z = 2048
G = " 0.006 degrees
multi–turn absolute
4096 revolutions
3 Motor Selection, Position/Speed Sensing

 Loading...
Loading...










