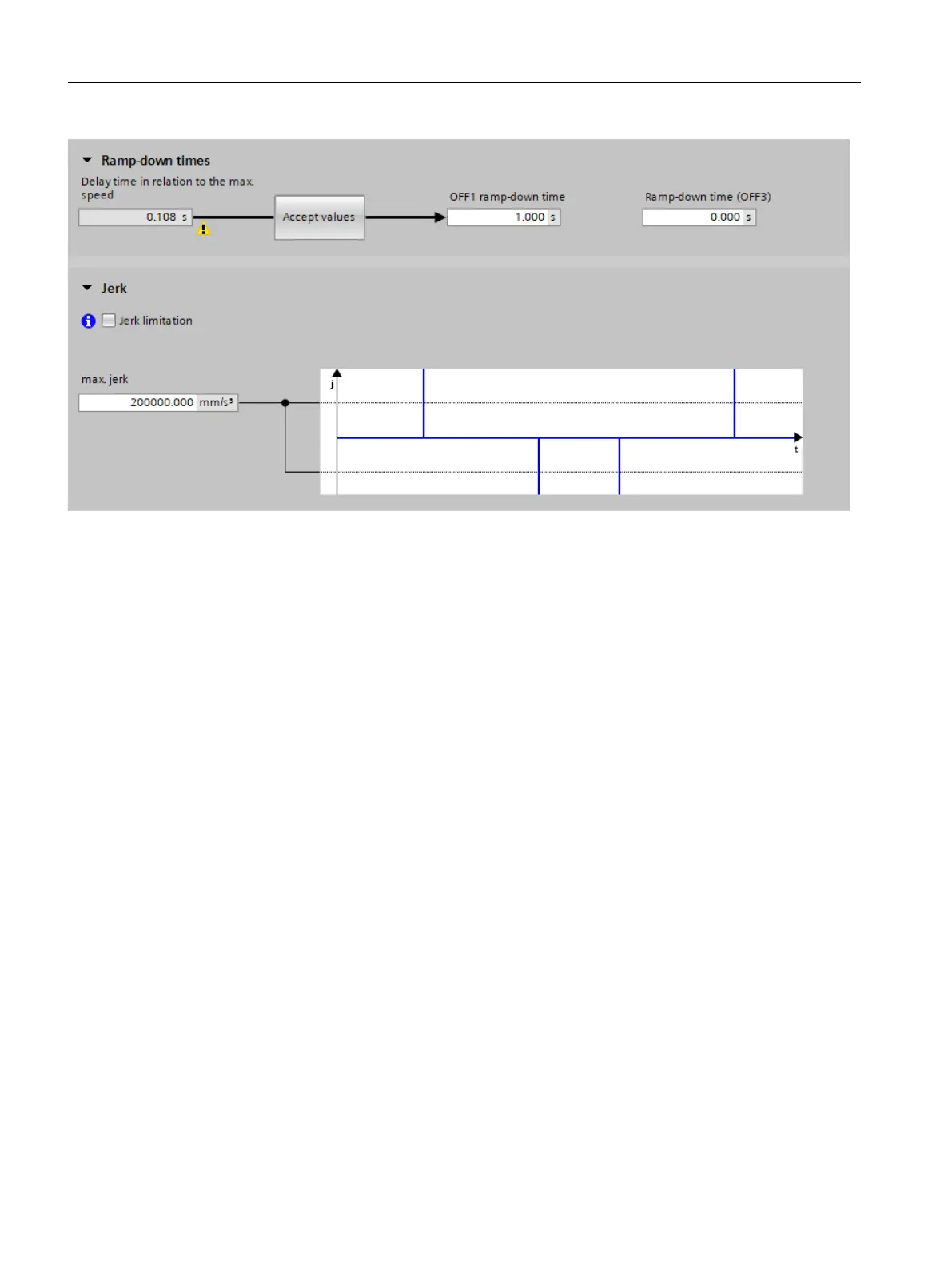
Figure8-8 Specifying the ramp-down time and jerk limitation
Step 2: Specifying the ramp-down time referred to the maximum speed
The velocity, acceler
ation and deceleration limitation values do not apply for faults or for
a safe stop. Instead, the ramp-down times for OFF1 and OFF3 are used. The proposed
ramp-down time is displayed in the "Delay time in relation to the max. speed" eld.
1. If you want to apply this delay time to OFF1, click the "Accept values" button.
The delay time is now applied to the "OFF1 ramp-down time" (p1121) eld.
2. Enter the required value in eld "Ramp-down time (OFF3)" (p1135).
3. Save the settings.
Step 3: Specifying the maximum jerk limitation
A jerk limitation delays the acceleration. Proceed as follows to specify the maximum jerk
limitation:
1. Activate option "Jerk limitation". (p2575)
2. Enter a value for the maximum jerk limitation under "max. jerk" (p2574).
The converted values for the minimum acceleration time and minimum deceleration time
are displayed in the elds below the graphic.
3. Save the settings.
Commissioning (Startdrive)
8.6Carrying out guided quick startup
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
264 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB