You can adjust the function of digital inputs by interconnecting the signal parameters to
c730 and c731 in commissioning tools.
The f
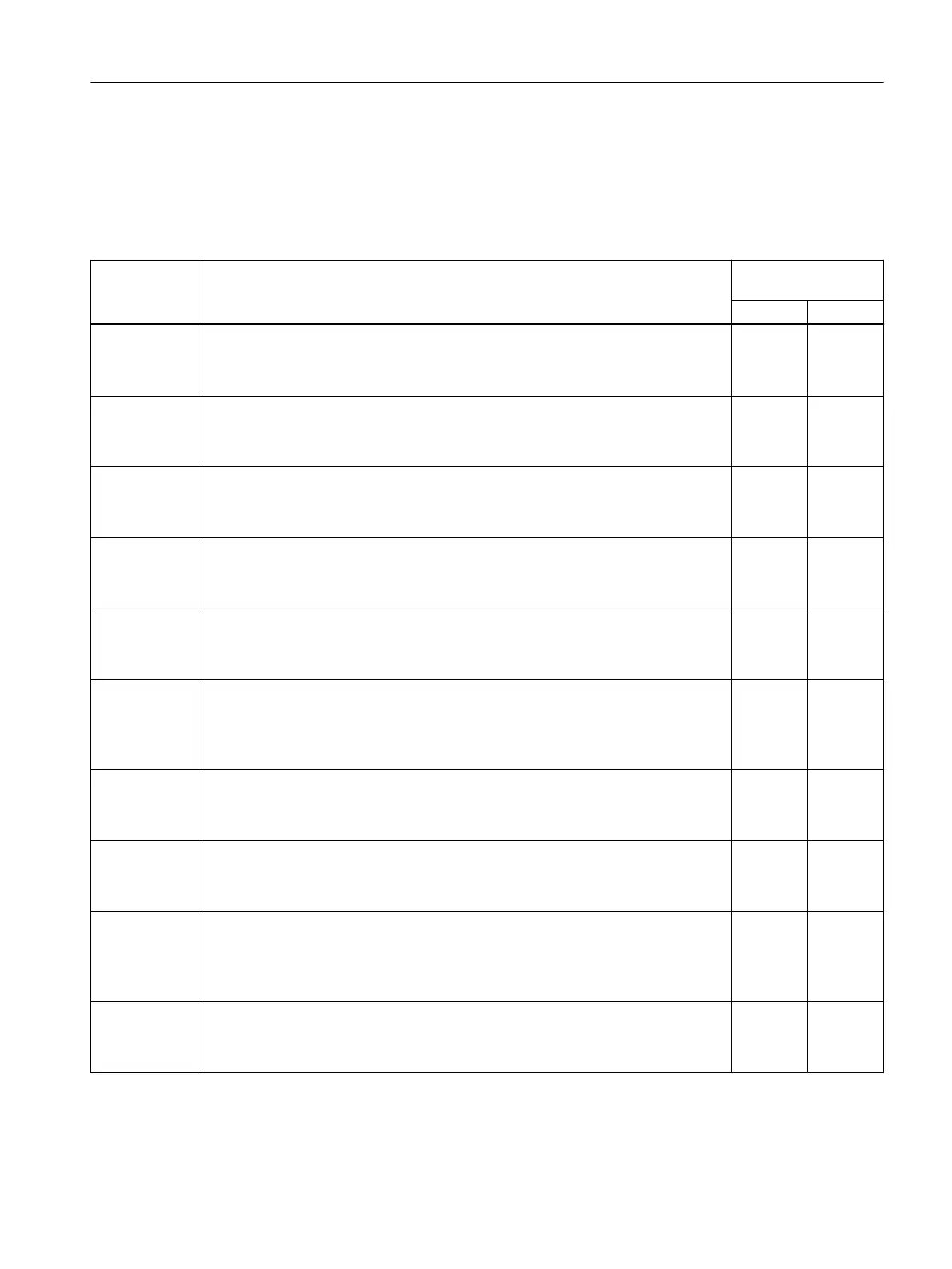
ollowing signals are assignable to the digital outputs.
Table 10-3 Assignable signals
Parameter Signal Available control
mode
EPOS S
r899.2 Operation enabled (RDY)
• 1: the con
verter is ready.
• 0: the converter is not ready (a fault occurs or the enable signal is missing).
✓ ✓
r29404.0 Ready for servo-on (RDY_ON)
• 1: the con
verter is ready for servo-on.
• 0: the converter is not ready for servo-on.
✓ ✓
r2139.3 Fault present (FAULT)
• 1: in the fault s
tate.
• 0: no fault.
✓ ✓
r2684.10 Target position reached
• 1: the con
verter has reached target position.
• 0: the converter has not reached target position.
✓ -
r2199.0 |n_act| < p2161: zero speed detection (ZSP)
• 1: mot
or speed ≤ zero speed (can be set with p2161).
• 0: motor speed > zero speed + hysteresis (10 r/min).
✓ ✓
r1407.7 Torque limit reached (TLR)
• 1: the
generated torque has nearly (internal hysteresis) reached the value of the
positive torque limit or negative torque limit.
• 0: the generated torque has not reached any torque limit.
✓ ✓
r899.12 Motor holding brake control
• 1: release t
he motor holding brake. The motor can rotate.
• 0: engage the motor holding brake. The motor cannot rotate.
✓ ✓
r899.13 Motor holding brake status
• 1: the mo
tor holding brake is active. The motor cannot rotate.
• 0: the motor holding brake is released. The motor can rotate.
✓ ✓
r29404.2 Overload level reached (OLL)
• 1: the
motor has reached the parameterizable output overload level (p29080 in
% of the rated torque).
• 0: the motor has not reached the overload level.
✓ ✓
r2684.11 Home position set (REFOK)
• 1: homing is comple
ted.
• 0: homing is not completed.
✓ -
Functions
10.2Inputs/outputs
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 323