Active homing by using encoder zero mark
The following
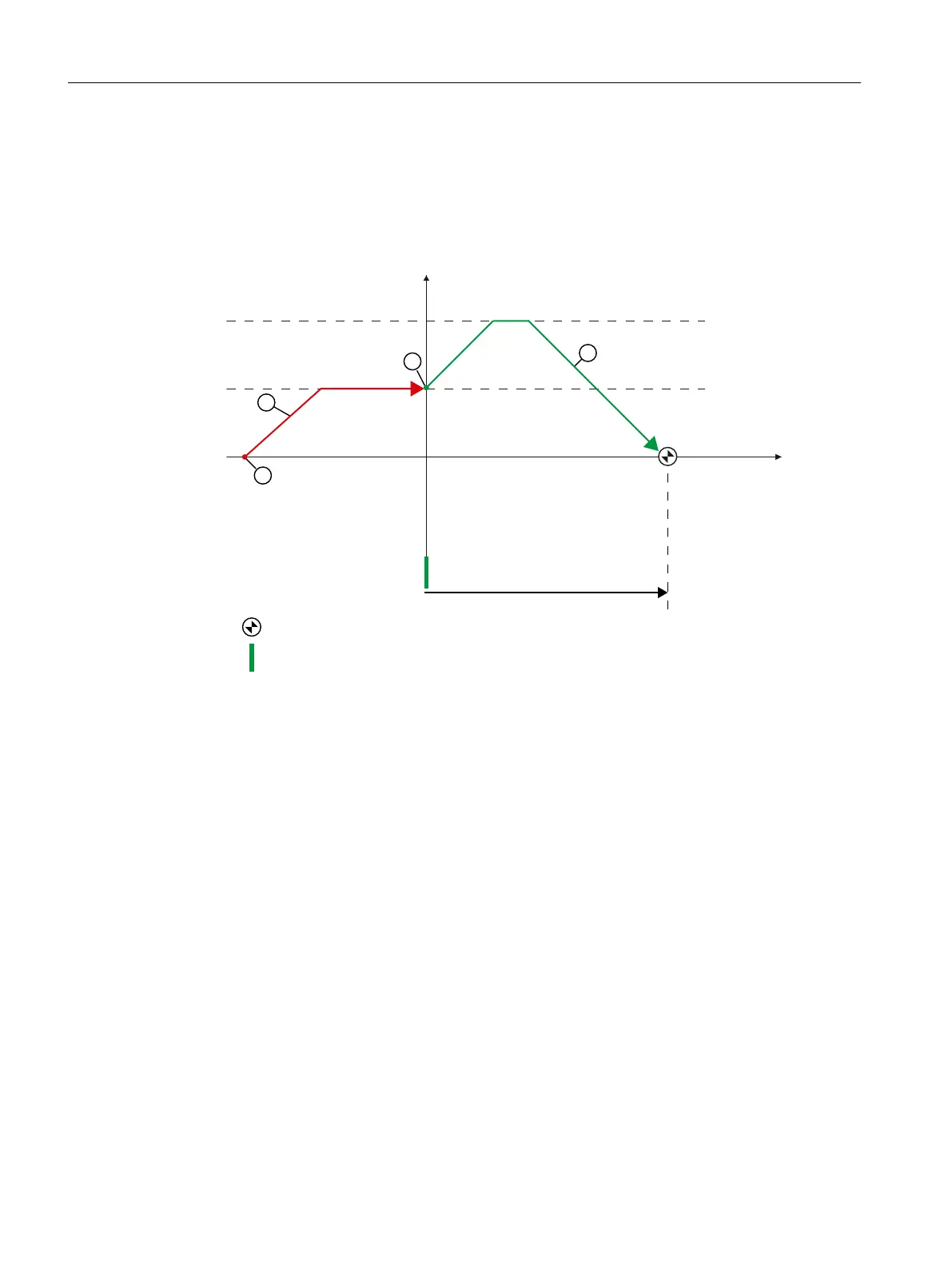
gure shows an example of the homing motion with the following settings:
• Active homing with encoder zero mark
• Homing in the positive direction
• Positive home position oset
3RVLWLRQ
9HORFLW\
$SSURDFKYHORFLW\
WRWKH]HURPDUN
$SSURDFKYHORFLW\WR
WKHKRPHSRVLWLRQ
=HURPDUN+RPLQJPDUN
+RPHSRVLWLRQ
+RPHSRVLWLRQRIIVHW
²
Motion sequence
① Start of active homing
② Approach to the homing mark in the homing direction with the corresponding approach
v
elocity to t
he zero mark
③ Detection of the homing mark
④ Approach to the home position with the corresponding approach velocity to the home position
Figure10-12 Example: active homing in positive direction by using encoder zero mark
Active homing by using external zero mark via digital input
The f
ollo
wing
gure shows an example of the homing motion with the following settings:
• Active homing with digital input
• Approach in the positive direction
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
380 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB