CD600 Plus - User's Manual
4.20
GAP CONTROL (CBND AND CSGA)
There are applications where the control is unstable near the Setpoint due to actuator dead band,
noise or other reasons. In this case, it is advisable to have a controller with a differentiated action
around the Setpoint.
The gap control or gap with special gain can be used to solve this problem.
EXAMPLE:
Considered error (ê) for a gap control with a band equal to 10% (CBND=10) and special gain equal
to zero (CSGA=0).
ê[%]
e[%]
CBND
20
20 30
0
-20
10
10
-10
-10
-2
-30
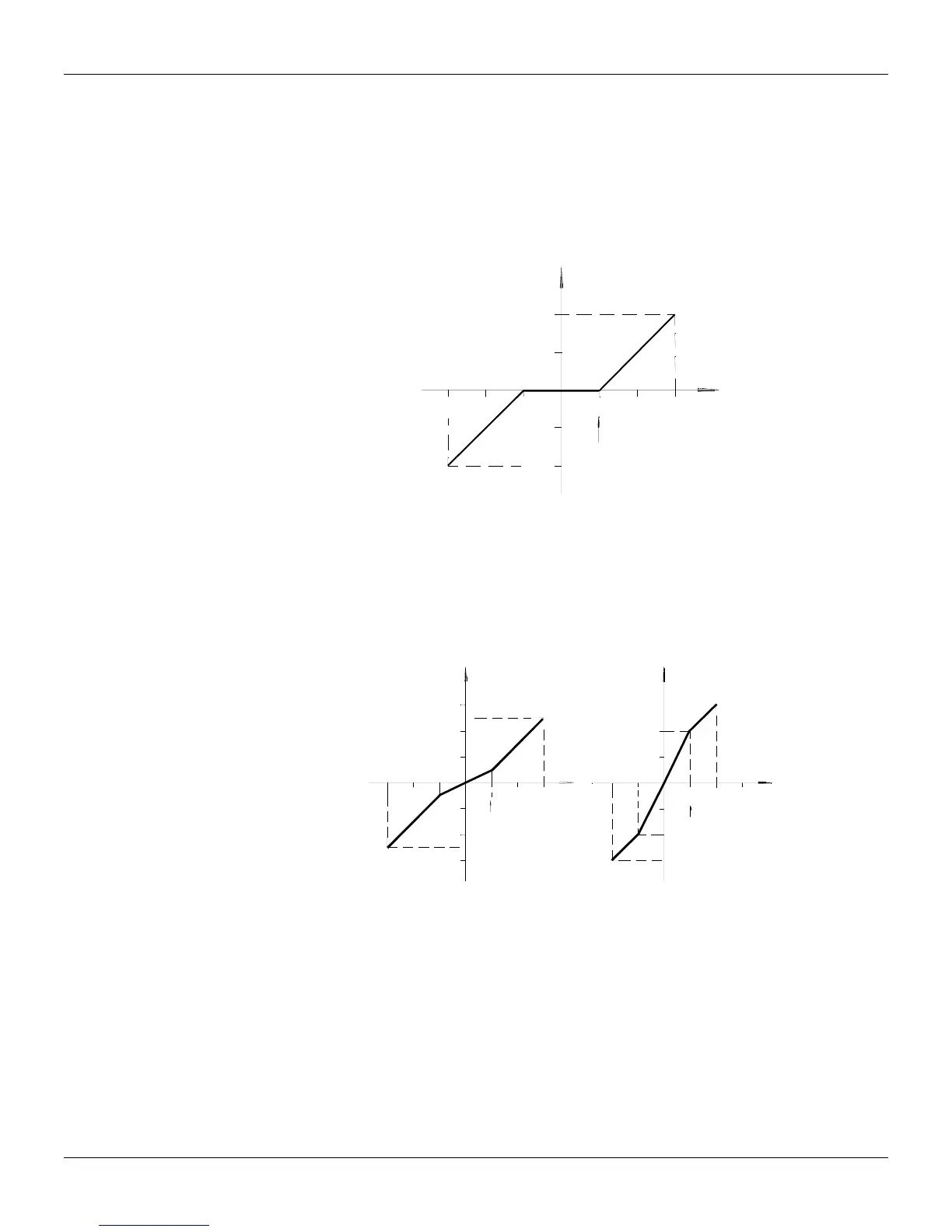
Fig 4.9.3 - Gap Control with Gain=0
Some processes may require a special gain within the band. In such cases, it is possible to select a
factor at parameter CSGA which multiplies the error, thus making the error to be considered in the
PID calculations to be:
ê=e.CSGA
Thus, the control action will be, within the Gap, faster when CSGA>1 and slower when CSGA<1.
For CBND=0 (null band) the gap control is not activated.
a)
-10%
CBND
-10%
10%
10%
ee
-10%
20%
CBND
BAND = CBND = 10%
GAIN IN BAND = CSGA = 0.5
BAND = CBND = 10%
GAIN IN BAND = CSGA = 2.0
10%
b
Fig 4.9.4 - Gap Control - (a) Gain < 1, (b) Gain > 1
CONTROL WITH ADAPTATIVE GAIN (CIAG, CLIN, CAAD)
The adaptative gain modifies the PID constants by a factor G. This factor G follows a curve of 13 or
26 points as a function of the Setpoint SP, of the Process Variable PV, of the deviation (error) DEV,
of the output OUT, or of an external variable EXT. The type of signal that generates the gain curve is
selected in parameter CIAG.
Curve selection is performed by CLIN. The points of the curve are specified in the General Loop, in
blocks of the Function 31 - Linearization Curve. The curves that may be performed are shown on
Table 4.31.1 (page 4.59).